


Tool/software:
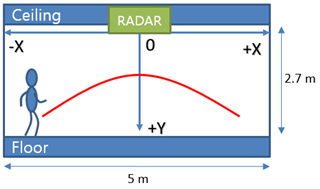
The IWRL6432 sensor was mounted on the ceiling facing the floor.
When detecting a standing person, a problem occurs where the distance between the two side areas of the sensor increases.
In the picture below, the red line graph shows the change in distance (Range) of the detected points.
Is there any way to solve this problem?
Below is the configuration file used.
|
sensorStop 0 guiMonitor 2 3 0 0 0 1 0 0 1 1 1 antGeometryCfg 0 0 1 1 0 2 0 1 1 2 0 3 2.418 2.418 trackingCfg 1 2 100 3 62.30 190.0 100
|
Note:
The position parameters of the installed sensor are set to 0, so world space and sensor space are the same.
The Elevation FFT Size is 2 and the Z axis is not used.
Please let me know how to solve it.
