


Tool/software:
Hi,
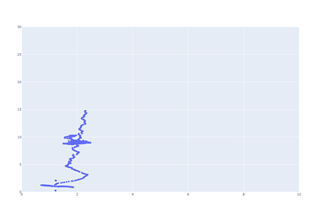
Below is the attached video if you observe the sensor is mapped on the truck with a holder and we were doing some tests. The sensor is super sensitive even with slightest of the tilt. We mapped the target data alone and you see that even when the person walked straight as we go away from the sensor there is a deviation on the X axis. The person who started at 1.6 and by the end he ends up 2.3. Why is it that the dynamic points and target data are drifting as we are walking away from the sensor but while walking towards the sensor we do not have any problem. How can we solve this problem? I will be glad to hear from you a solution.
Regards,
Divya Teja Settimali

