Tool/software:
Hello,
I have a question about Multi object beamforming.
I'm using the mmWave demo of mmwave_sdk_03_06_02_00-LTS on AWR1843AOP.
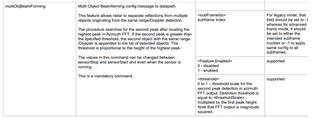
I can choose between two settings for "peak selection in 2D azimuth/elevation FFT output";
- Maximum peak search using HWA statistics block
- Maximum peak search using HWA CFAR
How should I use the above two settings differently?
Please let me know the examples of suitable applications for each setting?
Please advise.
Thanks,
Shoko