Tool/software:
Hardware:
IWRL6432BOOST
Software:
video_doorbell_demo.Release.appimage on radar_toolbox_2_10_00_04
Industrial_Visualizer.exe
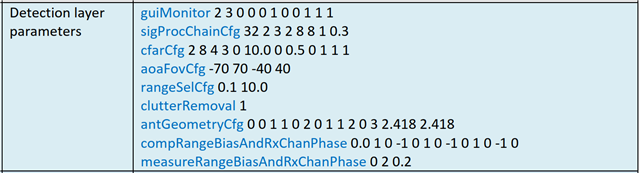
We want to evaluate human vs non-human classification based on machine learning for video doorbell demo. We have flashed above prebuilt firmware on radar_toolbox_2_10_00_04 into IWRL6432BOOST board and used following modified chirp configuration:
% ***************************************************************
% long_range_state_machine.cfge: Used to detect the presence of humans
% in outdoor environments, specifically for video doorbells. Detects
% movement through the point cloud, which is fed into a state machine
% to increase detection robustness.
% ***************************************************************
sensorStop 0
channelCfg 7 3 0
chirpComnCfg 23 0 0 256 4 68 0
chirpTimingCfg 9.9 24 0 12.5 62
frameCfg 2 0 280 8 250 0
antGeometryCfg 0 1 1 2 0 3 0 0 1 1 0 2 2.418 2.418
guiMonitor 2 0 0 0 0 1 1 0 1 1 1
sigProcChainCfg 64 2 1 1 0 0 0 15
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1
aoaFovCfg -80 80 -40 40
rangeSelCfg 0.1 8.0
clutterRemoval 1
compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000
adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin
adcLogging 0
lowPowerCfg 1
factoryCalibCfg 1 0 40 0 0x1ff000
% Motion/Presence Detection Layer Parameters
mpdBoundaryArc 1 0.5 5 -30 30 0.5 2
mpdBoundaryArc 2 0.5 3 -70 -31 0.5 2
mpdBoundaryArc 3 0.5 3 31 70 0.5 2
stateParam 3 3 12 50 5 200
majorStateCfg 8 6 60 20 15 150 4 4
clusterCfg 1 0.5 2
% Tracking Layer Parameters
sensorPosition 0 0 1.2 0 0
gatingParam 3 2 2 2 4
allocationParam 6 10 0.1 4 0.5 20
maxAcceleration 0.4 0.4 0.1
trackingCfg 1 2 100 3 61.4 191.8 100
presenceBoundaryBox -3 3 0.5 7.5 0 3
% Classification Layer Parameters
microDopplerCfg 1 0 0.5 0 1 1 12.5 87.5 1
classifierCfg 1 3 4
rangeSNRCompensation 1 12 6 5 12
presenceGPIO 1
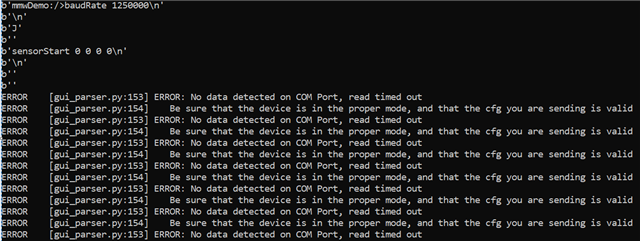
% baudRate 1250000
baudRate 115200
sensorStart 0 0 0 0
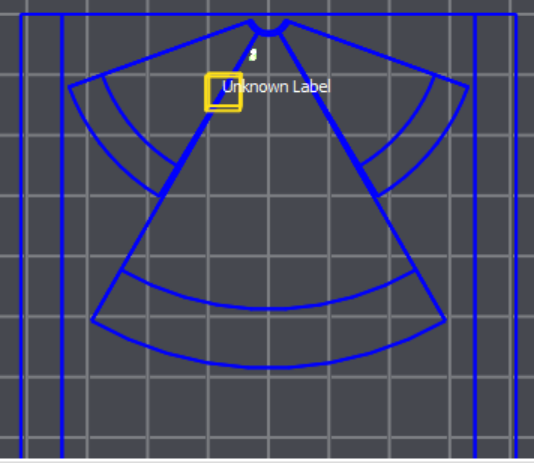
When we have conducted video doorbell experiment, we found there were no bound boxes on human and non-human object(maybe first appear but then disappear) and the label is always unknown label. We can't classify human and non-human object. Could you give us suggestions for performing human vs non-human classification on video doorbell demo based on machine learning approach? Thank you very much.