Other Parts Discussed in Thread: AWR1843, AWR1243
Tool/software:
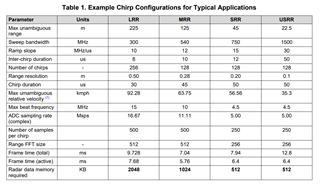
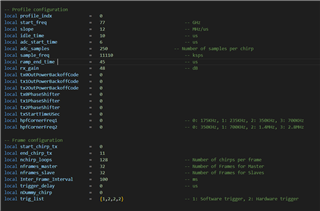
can you send me the chirp parameters for the drone identification task. can you suggest them correctly
Tool/software:
can you send me the chirp parameters for the drone identification task. can you suggest them correctly