Other Parts Discussed in Thread: TCAN4550, AWRL1432
Tool/software:
Hi expert,
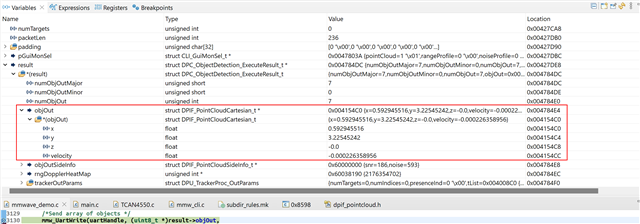
I want to get the target list (array of detected targets, include position and velocity) and transmit it through CAN. I made the following modifications based on the demo source code to try.
1. Set the gMmwMssMCB.guiMonSel.pointCloud = 1 (first parameter of guiMonitor)
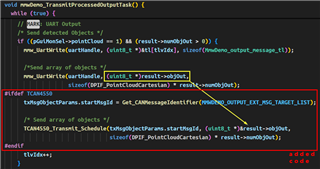
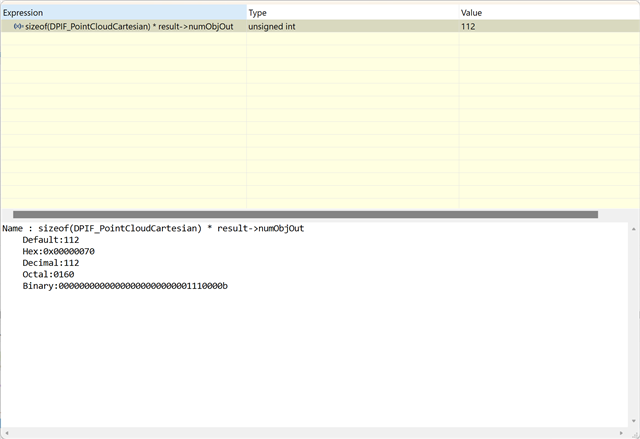
2. Add CAN transmit code in "void mmwDemo_TransmitProcessedOutputTask()" function, see follow picture
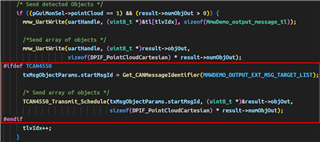
But there is a issue, the "Get_CANMessageIdentifier" function don't have "MMWDEMO_OUTPUT_EXT_MSG_TARGET_LIST" type, it will be judged as "CAN_MESSAGE_MMWDEMO_MAX"
Could you give me some advices to achieve the target list data transmission through CAN?
B.R.