Tool/software:
Hello,
I'm currently working on a project where I'm using the TI mmWave sensor to detect and track static objects in a room to determine if changes have been made in the setup of a room (classrom tables or desks etc).
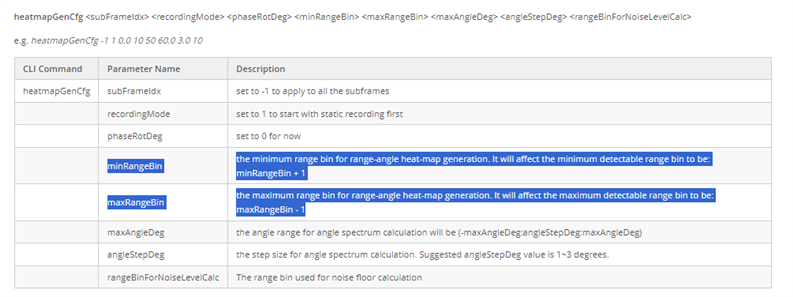
I currently have the TI Area Scanner demo running on the IWR6843AOP with a Python visualiser plotting the static and dynamic points into a 3D plot (in the config, I turned off heatmapGenCfg > recordingMode to plot all data without filtering). I'm running into some limitation which I've also seen in the TI Area Scanner demo video, it seems that the range (distance) of the sensor to detect static objects is limited to 3 meters whereas dynamic objects can be detected and plotted from farther distances.
As such, my question is as follows:
Is there a way to generate/collect more data (points) of static objects in a room, as well as data of static objects that are further away from the sensor than 3 meters, so this can be plotted in a 3D visualiser?
As I've used the pymmwave parser with some modifications of my own, as well as a custom built Python visualiser, my question is about the TI mmWave Area Scanner .bin file proved from TI.
I hope anyone can shine some light on this matter.
Regards