Other Parts Discussed in Thread: TMAG5110, DRV5055, TMAG5111, TMAG6180-Q1
Tool/software:
We are exploring the use of TI's hall encoders to optimize the detection of the rotation of a 90mm ring.
Currently we have two separate hall latches that can detect about a 2 degree rotation of a 90mm ring.
However, 1 degree detection is preferred for user experience. We only need incremental encoding including direction.
Would this be possible with TI's 3D linear hall effect sensors (e.g. TMAG5170)? Or otherwise AMR type sensors?
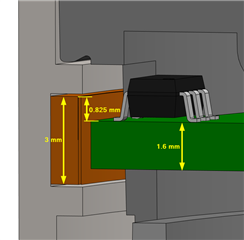
The current mechanical situation is as follows (orange is a magnetized band with ~2mm poles, specs can be changed):