Tool/software:
Dear Experts,
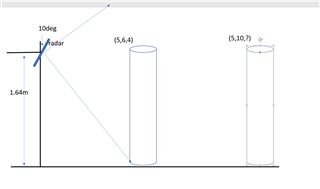
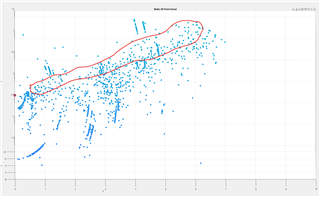
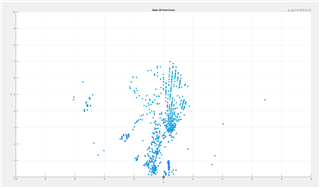
I have ppintcloud data from the setup showed in image and the pointcloud looks bit off , as the z-axis changes drastically for the same ground plane I have shared the side view(yz) and and top view xy. the person walk close then z reduces and increase as the person far away. in theory it is correct but how do I make correct and relative to ground plane. I did the required translation still the same
I did try with tilt angle trnalsate but still?
also how can I make the potincloud more dense, I was using the default config for 3D point over ethernet, the dataszie should not be problem.
Best regards,
DM