Other Parts Discussed in Thread: AWRL6844, SYSCONFIG, AWRL6432
Tool/software:
Dear TI.
I would like to get some guidance on how to do CANFD communication in low power mode.
I implemented it using the example(mmwave_demo), but the following problems occurred.
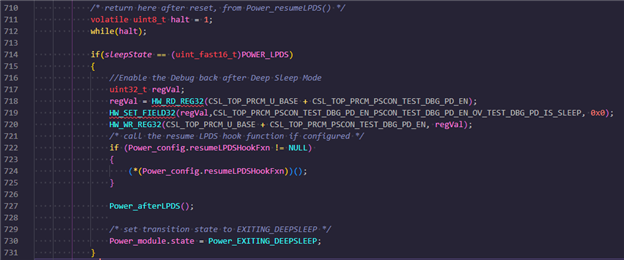
When configuring CAN FD communication in Low Power Mode, EVK stops operating after one operation.
The same phenomenon occurs even if only communication is set without CAN Tx and Rx.
In normal power mode, CAN communication is performed well.
EVK will work fine in low power mode if CANFD is not configured.
[Configuration environment]
EVK : AWRL6844 (PROC182 REV A)
SDK : mmwave_l_sdk_06_00_02_00
DEMO : "mmwave_demo"
SYSCONFIG:

EVK Switch : S1.1 Switch Off (STAN-BY-Mode Disable)
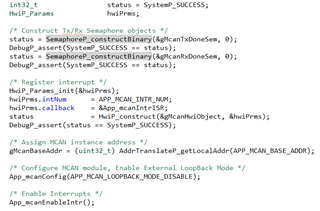
CANFD communication settings are configured with reference to Example "mcan_external_read_write"
CAN configuration is implemented within the DPC_init() function.
Best Regards.
J.Soo