Other Parts Discussed in Thread: UNIFLASH, IWRL6432, SYSCONFIG, IWRL6432AOP
Tool/software:
I have IWRL6432Boost EVM with me. I want to detect human, when human detected i need to that send data to another host MCU via UART .
When I tried with SDK5, (MMWAVE_L_SDK_05_05_03_00)
Working of demo :
The demo given motion_and_presence_detection works with visualizer tool. Before that i need to flash the kit using Uniflash tool by turning on the Management mode in S1.1,S1.2. and after flashing the motion_and_presence_detection_demo_auth.Debug.appimage, then change the mode to Functional, S1.1=1.
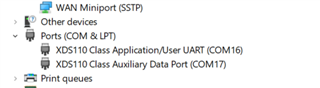
In Visualizer tool we need to send CLI configration file to the IWRL6432 device via UART (xds1100 emulator here). After that IWRL6432 device will send TLV data to the visualizer app via UART. This is my understanding of how the SDK demo works here.
But i want to develop a custom code,
1. Board initialization,
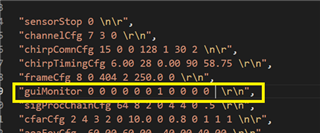
2. CLI hard coded data initialization,
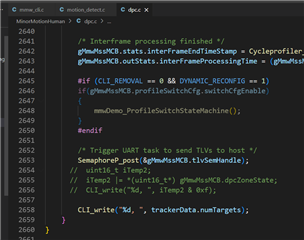
3. Function that gets the ADC data, function to process the ADC data to Digital front end data, function to identify human, function to find the distance of human,
4. Based on the output of the function, i could send the data to another host MCU via UART.
Could you tell me how to do the above things. I dont want to use the Visualizer / any other python code to transfer the CLI command. The program has to start with the CLI data i written in the CLI variable.
I am doing hard work to edit the demo code to make it work as per my custom requirement. Hope you would help me.