Tool/software:
I'm tring to read radar cube data via spi. I'm using the example soruce code from radar toolbox.
Basically I could read radar cube data with setting.
/* 1 -> Raw ADC, 2 -> 1D FFT, 3 -> 2D FFT, 0 -> No Transfer*/
#define SPI_DATA_STREAMING 2
/* 1 -> Via FTDI Chip, 2 -> Via Logic Analyzer, 0 -> No Transfer */
#define SPI_DATA_STREAMING_MODE 1
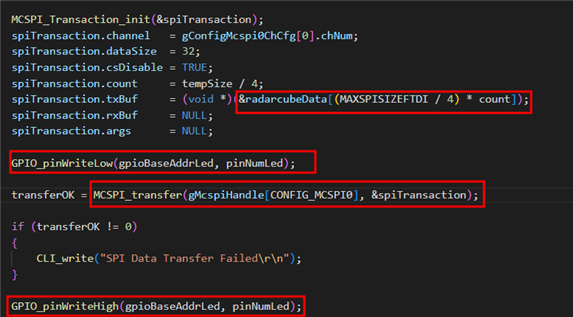
What i want to change here is I want to send the data with callback mode not blocking mode, so that the radar can do doa and cfar dpu during transfering the spi data.
For this i changed code like below, but it didn't work.
Where shoud i change the code or what should i add?
Is that possible to send spi data by callback mode and peripheral mode?
MCSPI_OpenParams gMcspiOpenParams[CONFIG_MCSPI_NUM_INSTANCES] = {
{
//.transferMode = MCSPI_TRANSFER_MODE_BLOCKING,
.transferMode = MCSPI_TRANSFER_MODE_CALLBACK,
.transferTimeout = SystemP_WAIT_FOREVER,
//.transferCallbackFxn = NULL,
.transferCallbackFxn = App_callbackFxn,
.loopback = MCSPI_LOOPBACK_DISABLE,
.msMode = MCSPI_MS_MODE_PERIPHERAL,
.mcspiDmaIndex = 0,
},
};