Tool/software:
Hello everyone,
I am currently working on a project using the STMF4 series to drive the TUSS4470, paired with a 1 MHz transducer. I aim to capture echo signals, but I’ve encountered some issues with the Vout output when observed on an oscilloscope.
I conducted two experiments:
- Placing the transducer at the bottom of a cup to measure water height, as per the application manual.
- Positioning the transducer approximately 25 cm away from a wall.
In both cases, I noticed the following behavior:
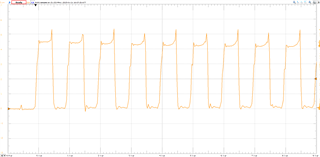
- Even without transmitting a pulse, the Vout pin of the TUSS4470 outputs a stable, periodic pulse. Is this noise?
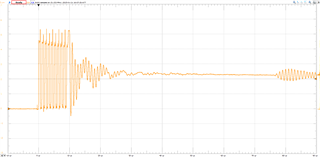
- After transmitting a pulse, the Vout pin only shows the transmitted pulses, with no apparent echo signal.
 As shown in this photo, no pulses are emitted before the oscilloscope is triggered.These two pictures are the same as the previous one, but zoomed in to 1ms and 100us.
As shown in this photo, no pulses are emitted before the oscilloscope is triggered.These two pictures are the same as the previous one, but zoomed in to 1ms and 100us.

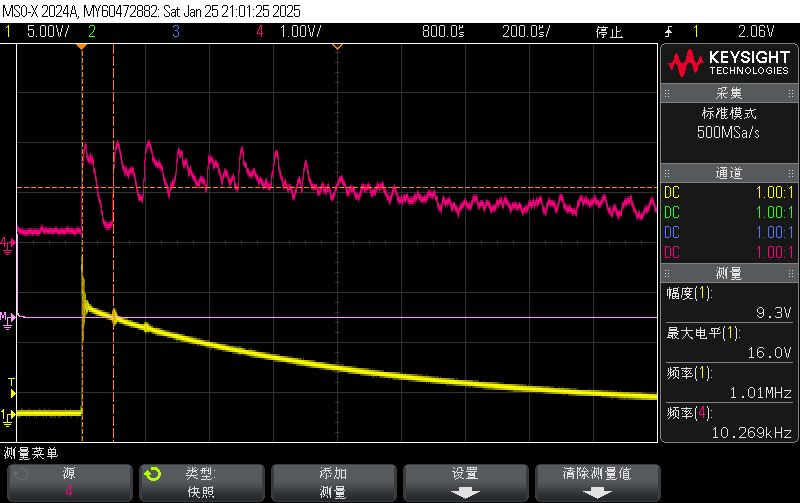
- To supplement the image, the blue line is the Vout pin and the yellow line is the positive pole of the emitter.
How can I confirm whether the echo signal is being received correctly? Could this behavior be related to my setup or configuration?
Any guidance or suggestions to debug this issue would be greatly appreciated!
Thanks in advance!