Tool/software:
Hello,
I’m working on a modified version of the Area Scanner demo, and I'm trying to tune my chirp profile for my application's requirements.
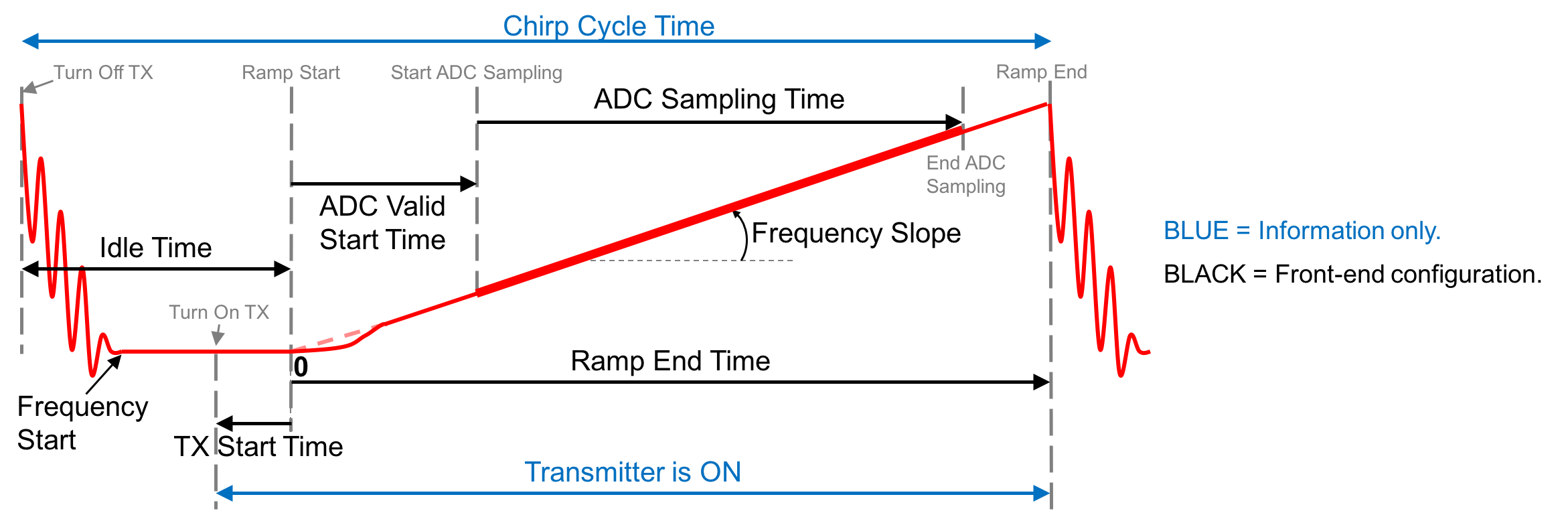
There's one parameter that I don't quite fully understand its implications, which is the idleTime.
Right now, I have an idleTime of 100us:
profileCfg 0 60 100 10 79 0 0 24 1 256 4000 0 0 30
But I can set this much smaller, like 10us, or much larger and the profile will still be valid.
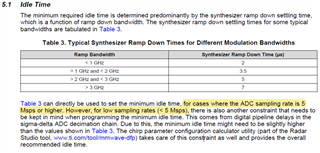
I know that there's a minimum of a couple of micro seconds, based on the bandwidth used, in my case is 3.5us.
And it should also be a bit higher if I use a low sampling rate, which I do (4 Msps).
I also know that as I lower the idleTime, it increases max velocity and velocity resolution, while it lowers
compliance chirp time and RF duty cycle.
My questions are:
- Are there other implications of lowering the idleTime apart from those described above?
- Does it impact motion sensitivity? A higher velocity resolution would mean a loss in motion sensitivity, right?
- What is the compliance chirp time?
- Is it essentially just a tradeoff between a higher velocity resolution and power consumption (RF duty cycle)?
Please tell me if there are other considerations and how should I approach the tuning of this parameter.
Thank you for your support!
Best regards,
Ed