Tool/software:
Hello,
I´m currently working on a project for slip angle estimation via True Ground Speed Measurment.
For this I need to get the y- and x-component of the estimated velocity.
In my understanding, the example code uses the y-component only and the x-component is disregarded.
There are a few questions for my general understanding and for finding a solution:
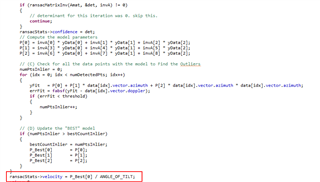
1. The implementation of the RANSAC-algorithm ist programmed in mss_tracker and is used to filter outliners, not to calcualte any velocity - is that right?
2. Speaking of the RANSAQ-algorithm in mss_tracker.c: Each velocity data of each measurement point in the pointcloud has it´s own information of the angle regarded to the longitudinal axis of the radarsensor. - is that right?
3. Where is the calculation of the resltuing velocity implemented and are the individual angles of the velocity vectors considered?
4. Further more, has the resulting velocity an angle regared to the longitudinale axis and only the the y-component is taken to account in the example code?
5. Where (in which file of the example code) can I implement further trigonometrical calculation of the velocity for the velocity component calculation?
I´d be very grateful if you could help me with this problem.