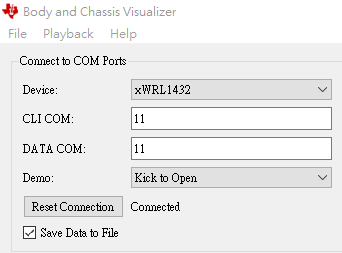
Tool/software:
We refer to the examples code radar_toolbox_2_10_00_04-Kick_to_Open
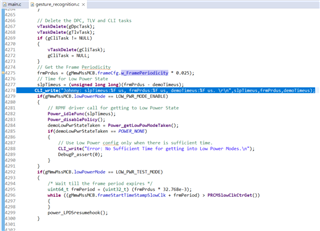
Added MMWAVE_L_SDK_05_05_00_02 - drivers\mcan\mcan_external_read_write
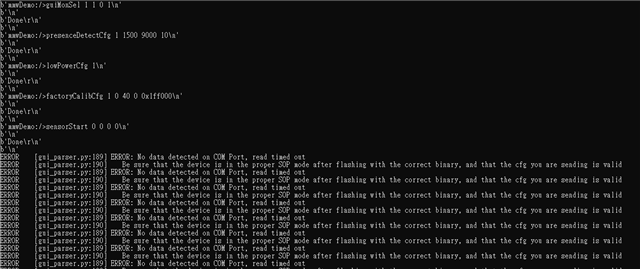
But it seems that the performance is insufficient and it cannot work properly! Do you have any other suggestions or references?