Other Parts Discussed in Thread: IWRL1432, SYSCONFIG, IWRL6432
Tool/software:
Hello,
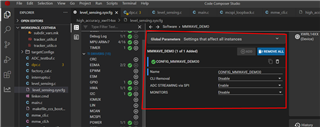
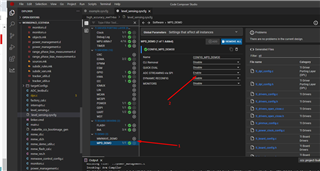
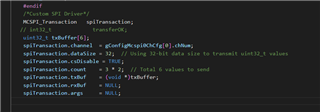
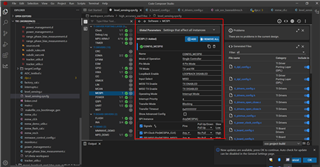
My requirement is to send level sensing data to an external MCU using SPI. I am currently working with the IWRL1432 BOOST board. I imported the source code into CCC Studio, modified it by enabling the MCSPI driver, making changes to the dpc.c file, and then flashed it onto the board using the mmWave Radar Visualizer.
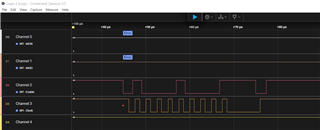
Additionally, I set the S1.6 pin to high on the board. However, when I checked the SPI_CLK pin on the J header, I didn't observe any signal. I am attaching pictures of the source code modifications below.
How should I proceed next to ensure my code is working correctly? Any suggestions?
Also, should I use the SPI_CS pin? If so, what is the base address and pin number for that?
Thanks && Regards
Amara Rakesh