Other Parts Discussed in Thread: MMWAVE-L-SDK
Tool/software:
We are facing problem in AWRL6432
during runtime the Can Interrupt Sporadically stops firing forever till power reset!
with some debugging we see we got Protocol Error however we already disabled the Protocol Error in IE Register!
and we are wondering why we are having protocol error in the normal communication
We Urgently need debugging session as this issue is impacting Production Software
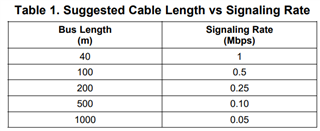
Images are added for reference,