Tool/software:
Hi,
We have designed a custom PCB based on AWR1843BOOST. We are using Medium Range Radar (MRR) example, which outputs data on both UART and CAN-FD by default.
I compiled and uploaded the same .bin on both EVM (AWR1843BOOST) and our custom PCB:
- Both EVM and custom PCB have UART data output. (MRR_Visualizer working)
- Have CAN output on EVM but not on the custom PCB.
Tests:
- I suspected BGA pins are not connected, removed R4 and R7 (0ohm jumpers): both pins have 3.3V on AWR1843 side, so it is connected.
- I checked if software gives any errors inside “Can_Initialize()” function, it is not.
- I checked CAN-FD lines on empty PCB, there is no problem.
- TODO: will be trying prebuilt binaries from previous radar_toolbox versions.
Details:
- Same pins used as EVM: D13 (CAN-FD_RX) and E14 (CAN-FD_TX)
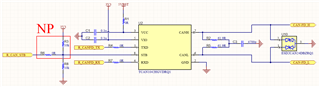
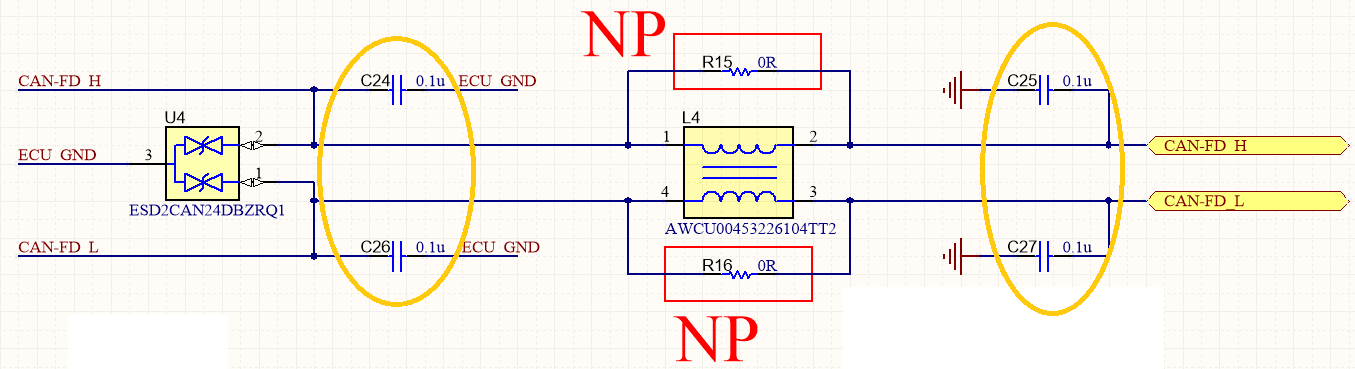
- Only difference to EVM, we dont use mux (TS3A5018RSVR) between AWR1843 to can transceiver (TCAN1042HGVDRQ1).
- [CCS Version: 12.8.1.00005] [SDK Version: mmwave_sdk_03_06_02_00-LTS] [Radar Toolbox Version: radar_toolbox_3_00_00_05]
- IC details on EVM and custom PCB. (EVM:19ZC8P9 Custom:32ZC309)


Custom PCB: