


Other Parts Discussed in Thread: IWRL1432, SYSCONFIG
Tool/software:
Hello TI Support,
I'm currently using the IWRL1432 board for a level sensing application, and I have a couple of questions regarding UART functionality:
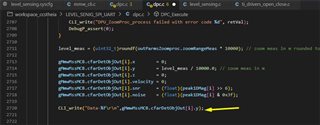
- To send sensor data to the serial monitor, I'm using the
CLI_write()function inside thedpc.cfile (snippet attached below). I’m able to see the data on the monitor. Could you please confirm if this is the recommended method? - Now, I would like to receive user commands from an external MCU or serial monitor via UARTA in interrupt mode.
- I enabled UARTA in the SysConfig file and selected the interrupt option.
- However, after this change, I encountered several errors (attached below).
- My question is: Do I need to implement a UART callback function to handle the interrupt? If yes, could you guide me on where to place the callback function and how to properly integrate it?
- Is it possible to use both the UART at a time in the code?

Looking forward to your support.
Thanks & Regards,
Swasthik.
