


Tool/software:
Hello everyone,
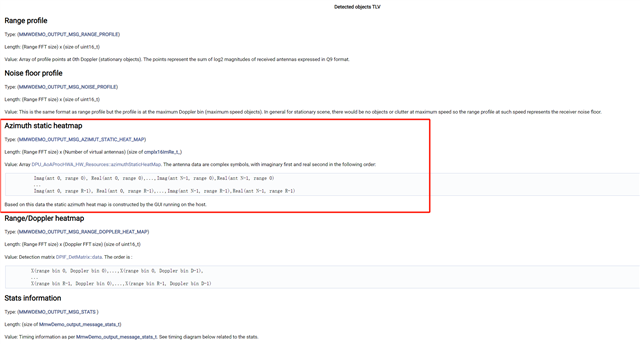
I want to use deep learning methods for object detection based on the rangeAzimuthHeatMap in TI's millimeter wave radar, but I don't know how to obtain the rangeAzimuthHeatMap(array in format of (numInputRangeBins * nAzimuthBins). Using "mmWave Demo Visualizer" can only output the Azimuth static heatmap(array in format of(Range FFT size) x (Number of virtual antennas) . Please can you clarify this aspect?
Sincerely,
Yang liu
Yang liu

