Other Parts Discussed in Thread: IWRL6432AOP, IWR6843, IWRL6432
Tool/software:
Hi TI Team,
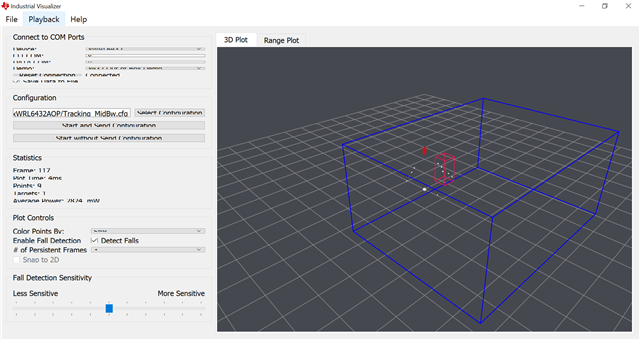
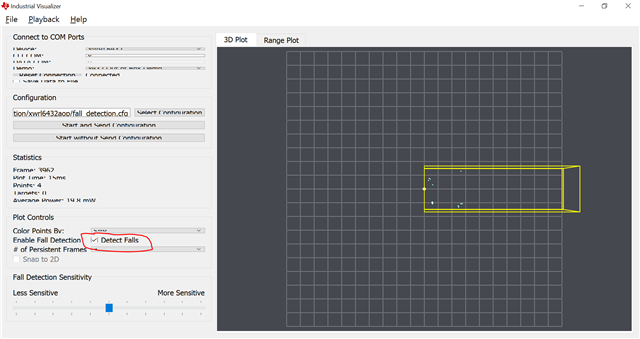
I am currently working with the IWRL6432AOPEVM and would like to evaluate its fall detection capabilities. Could you please confirm if fall detection is supported on the IWRL6432AOP?
If it is supported, I would appreciate it if you could provide the appropriate firmware and configuration (.cfg) files for this use case. I came across the "Fall Detection Using mmWave" reference, but it appears to be specifically designed for the IWR6843AOPEVM.
Looking forward to your guidance.
Thank you,
Bhavya