Other Parts Discussed in Thread: UNIFLASH
Tool/software:
Hello TI Team,
I am currently working with the IWRL6432BOOST surface classification demo, specifically testing both the GRASS-NOT and WET-DRY modes.
I used UniFlash to flash the image located at the following path:
C:\ti\radar_toolbox_3_00_00_05\source\ti\examples\Industrial_and_Personal_Electronics\Robotics\surface_classification_ML_flow_pytorch\prebuilt_binaries\surface_classification_demo_SDK5502-GRASS-NOT.Debug.appimage
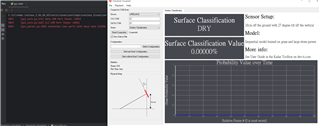
Then I ran the demo using the Industrial Visualizer.
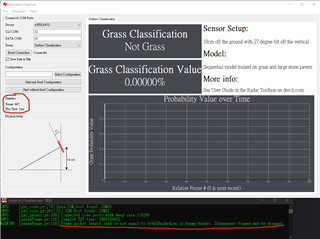
However, I encountered the following warning message:
"WARNING: Frame packet length read is not equal to totalPacketLen in frame header. Subsequent frames may be dropped."
How can I resolve this issue?
(The frame number in Statistics is counting.)
Additionally, I would like to ask:
How can I make the Industrial Visualizer display the WET-DRY label instead of GRASS?
Currently, it only shows the GRASS version. Is that the only available version?
Thank you very much for your support and assistance.
Best regards,