Other Parts Discussed in Thread: IWRL6432AOPEVM, IWRL6432
Tool/software:
Hello, expert
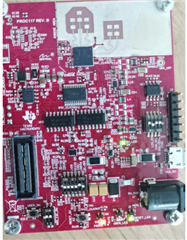
The model of the development board I use is IWRL6432and the Boost version is RPOC17 REV.B.
I tested the following several scenarios.
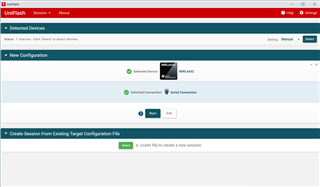
1. The development board is flashed with the firmware "radar_toolbox_3_10_00_05\source\ti\examples\Out_Of_Box_Demo\prebuilt_binaries\out_of_box_L6432.appimage".
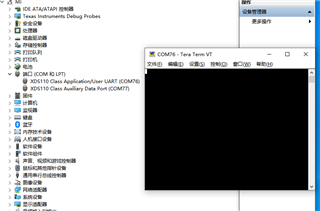
After flashing the device, the version number of the firmware can be displayed on the serial port. Then,
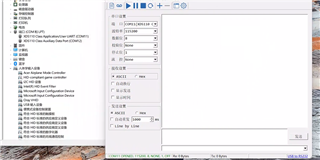
I sent the following configuration information to the development board through visualizer and obtained the commands that the firmware does not support (as follows txt).
% **************************************************************** % Configuration Start % **************************************************************** sensorStop 0 channelCfg 7 3 0 chirpComnCfg 8 0 0 256 4 28 0 chirpTimingCfg 6 63 0 75 60 frameCfg 2 0 200 64 250 0 guiMonitor 2 1 0 0 0 1 0 0 0 0 0 sigProcChainCfg 32 2 1 0 4 4 0 15 cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1 aoaFovCfg -60 60 -40 40 rangeSelCfg 0.1 12.0 clutterRemoval 1 compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 adcDataSource 0 C:/ti/mmwave_lp_sdk/examples/datapath/common/testBench/major_motion/adc_data_0001_CtestAdc6Ant.bin adcLogging 0 lowPowerCfg 1 factoryCalibCfg 1 0 40 0 0x1ff000 mpdBoundaryBox 1 0 1.48 0 1.95 0 3 mpdBoundaryBox 2 0 1.48 1.95 3.9 0 3 mpdBoundaryBox 3 -1.48 0 0 1.95 0 3 mpdBoundaryBox 4 -1.48 0 1.95 3.9 0 3 sensorPosition 0 0 1.44 0 0 minorStateCfg 5 4 40 8 4 30 8 8 majorStateCfg 4 2 30 10 8 80 4 4 clusterCfg 1 0.5 2 baudRate 1250000 sensorStart 0 0 0 0 % **************************************************************** % Configuration End % **************************************************************** % **************************************************************** % Response from Device % **************************************************************** sensorStop 0 Done mmwDemo:/>channelCfg 7 3 0 Done mmwDemo:/>chirpComnCfg 8 0 0 256 4 28 0 Done mmwDemo:/>chirpTimingCfg 6 63 0 75 60 Done mmwDemo:/>frameCfg 2 0 200 64 250 0 Done mmwDemo:/>guiMonitor 2 1 0 0 0 1 0 0 0 0 0 Error: Invalid usage of the CLI command Error -1 mmwDemo:/>sigProcChainCfg 32 2 1 0 4 4 0 15 Error: Invalid usage of the CLI command Error -1 mmwDemo:/>cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1 Done mmwDemo:/>aoaFovCfg -60 60 -40 40 Done mmwDemo:/>rangeSelCfg 0.1 12.0 Done mmwDemo:/>clutterRemoval 1 Done mmwDemo:/>compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 Done mmwDemo:/>adcDataSource 0 C:/ti/mmwave_lp_sdk/examples/datapath/common/testBench/major_motion/adc_data_0001_CtestAdc6Ant.bin Done mmwDemo:/>adcLogging 0 Done mmwDemo:/>lowPowerCfg 1 Done mmwDemo:/>factoryCalibCfg 1 0 40 0 0x1ff000 Done mmwDemo:/>mpdBoundaryBox 1 0 1.48 0 1.95 0 3 Error: Invalid usage of the CLI command Error -1 mmwDemo:/>mpdBoundaryBox 2 0 1.48 1.95 3.9 0 3 Error: Invalid usage of the CLI command Error -1 mmwDemo:/>mpdBoundaryBox 3 -1.48 0 0 1.95 0 3 Error: Invalid usage of the CLI command Error -1 mmwDemo:/>mpdBoundaryBox 4 -1.48 0 1.95 3.9 0 3 Error: Invalid usage of the CLI command Error -1 mmwDemo:/>sensorPosition 0 0 1.44 0 0 'sensorPosition' is not recognized as a CLI command mmwDemo:/>minorStateCfg 5 4 40 8 4 30 8 8 'minorStateCfg' is not recognized as a CLI command mmwDemo:/>majorStateCfg 4 2 30 10 8 80 4 4 'majorStateCfg' is not recognized as a CLI command mmwDemo:/>clusterCfg 1 0.5 2 'clusterCfg' is not recognized as a CLI command mmwDemo:/>
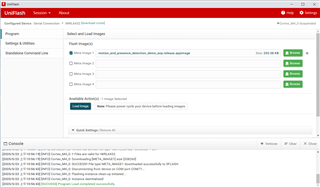
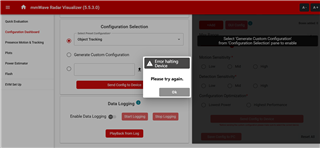
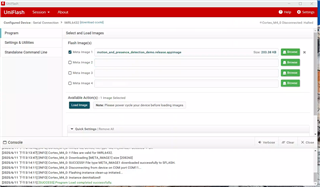
2. I brushed "radar_toolbox_3_10_00_05\source\ti\examples\Industrial_and_Personal_Electronics\mmWave_Demo\prebuilt_binaries\mmw" on the development
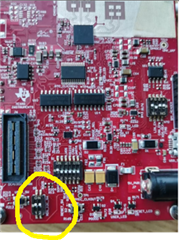
board After the firmware "ave_demo_xwrl6432.appimage", when the development version is switched back to "application mode", the DC input power supply is 5V3A,
but no information is obtained from the serial port (similar to the version information in 1).
Based on scenario 1, I analyzed that my development board should not be damaged, but I can't run the program on this fast development board now. Please help me.
Thanks.