Tool/software:
Hello
I am making a product using TMAG3001 by referring to TMAG3001_Exmaple_Code provided in this link. :www.ti.com/.../TMAG3001
I am interested in recognizing the angle change of the magnet,
So I referred to the WOC_ANGLE_EXAMPLE area.
float prevAngle = 0.0;
float currAngle = 0.0;
uint8_t angle_hyst = ANGLE_HYST_8DEG;
// Configure device settings
TMAG3001enableMagChannels(MAG_CH_EN_XYZ); // Enable magnetic channels
TMAG3001enableAngleMeasurement(ANGLE_EN_X1stY2nd); // Configure the device to enable angle measurements
TMAG3001setRanges(RANGE_80mTor240mT, RANGE_80mTor240mT); // Configure the range of the device
TMAG3001interruptThroughINT(0x00); // Configure the device to enable interrupts on the INT pin
TMAG3001intPinLatchedPulsed(INT_STATE_Pulse); // Configure the interrupt state of the device
TMAG3001enableWakeOnAngleChange(angle_hyst); // Enable WOC for angles
// Trigger a data conversion and read the initial angle measurement
// Note: This initial angle measurement will be used to check to see if the interrupt occurred as the result of an
// angle change as specified by angle_hyst or due to the angle going from 359->0 or 0->359
TMAG3001readSingleRegisterWithTrigger(CONV_STATUS_ADDRESS); // Read CONV_STATUS register and trigger conversion
delay_ms(1); // Delay to allow time for conversion to complete
prevAngle = TMAG3001getMeasurementANGLE(); // Read initial angle measurement
TMAG3001enterContinuousMeasureMode(); // Enable continuous measure mode to continuously sample data
In the example, I saw that TMAG3001 is set to Continuous Mode in the last line of the initialization code.
When I did this, an interrupt fell every time the angle changed, and it worked as I intended.
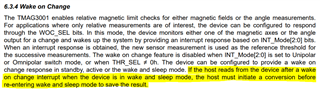
However, my product is battery-based, so I have to wait in low power when the magnet is not rotating.
So I tried changing this part to enter the WakeAndSleep Mode.
But when I do this, I get endless interrupts with a cycle of about 2~5ms.
This is the exact opposite of what I intuitively think.
Is there some additional setup that I'm missing? or Can't I use low power performance and WOC_ANGLE feature at the same time?
Please advice.
Regards.