Other Parts Discussed in Thread: UNIFLASH,
Tool/software:
I am using the uart_uniflash.py script to flash created binaries onto an AWR2944EVM created as instructed on P.41 of "MMWAVE MCUPLUS SDK User Guide" though the flushing was successful, the documentation does not answer some of my questions. Therefore I hope that you can help with that:
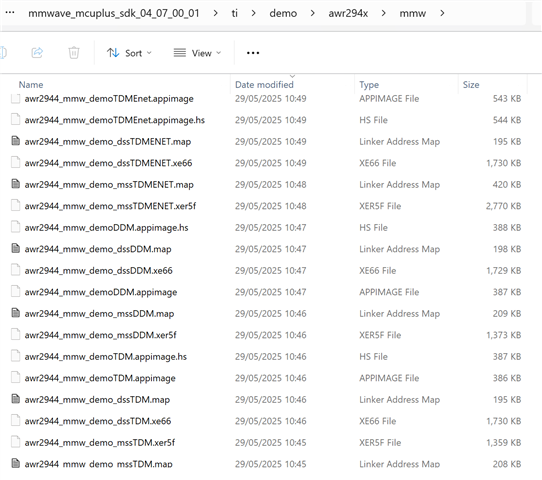
- The documentation states: "This will create <mmwave_sdk_device>_mmw_demo_mss.xer5f, <mmwave_sdk_device>_mmw_demo_dss.xe66 & <mmwave_sdk_device>_mmw_demo.appimage binaries", however gmake all created a multitude of files (see Image). I am curious why so many files were created? Is this typical only for the demo code to create TDM, DDM and other version of the 'same' demo code?
- As I understand the AWR2944EVM needs to get both the C66x and R5F flashed, these are the binaries that are created upon compilation of the demo code files. However the default.cfg file does not contain any paths to the binaries for the C66x and the R5F. To my understanding the meta image (, i.e. the .appimage) contains these paths, is this correct? If so which of the multitude of the created files are these? Is there a possibility to view the internals of the .appimage and explicitly check the used/referenced binary files?