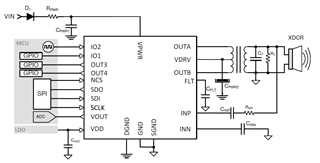
Other Parts Discussed in Thread: TUSS4470
Tool/software:
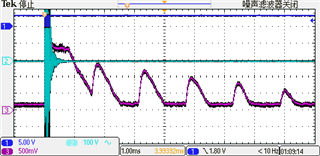
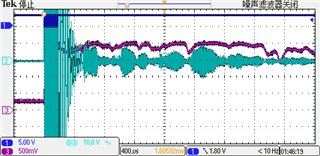
TUSS4440 works well when the the ultrasonic echo signal is weak, but when I use it for under-water ranging, it goes wrong.
I find the echo signal on the second side of driving transformer is about 20V peak-peak, while the drive pulse is 200V peak to peak.
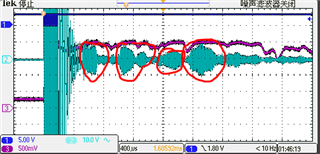
Maybe, this is the reason that TUSS4440 can not work, because the signal is too strong.
So, I hope to get some suggestion of signal process under such situation, including
a. I prefer to use TUSS4440 for this case, as I‘m familiar to it. How can I do in this way?
b. If TUSS4440 can not be used , then
b1. How to get the envelop of the echo in other way?
b2. How to protect the circuit against high voltage of 200V peak to peak, as TUSS4440 can?