Tool/software:
I'd like to revive this thread, as I've resumed work on the project.
With the current configuration, I've been able to detect objects accurately up to around 12 meters. Beyond that distance, detection is lost. I’ve tried adjusting the frequency slope, but I haven’t observed any noticeable improvement in the detection range.
quote to my last post related:Hi everyone,
I've been working with the IWR6843AOP sensor using the 3D People Tracking demo, with the sensor mounted on a wall at a 15° downward tilt. I've run several tests, adjusting the detection and tracking parameters across different configurations. I'm using the IWR6843AOP EVM board and configuring its parameters based on the documentation in Section 4 of the 3D People Tracking Demo Detection Layer Tuning Guide.
However, in nearly all cases, the maximum detection range caps at around 12.5 meters. Beyond this distance, no point cloud is detected, and no target is tracked.
In my most recent test, I increased the transmission power by configuring the txOutPowerBackoff to 0 dB, which did result in extended detection up to 14 meters in some cases—but with significantly more background noise throughout the reading.
I’d like to understand whether:
There’s something potentially misconfigured in my setup that's causing this limitation, or
The sensor is inherently limited to around 12.5 meters in most real-world scenarios, despite parameter tuning.
Any insights or suggestions would be greatly appreciated!
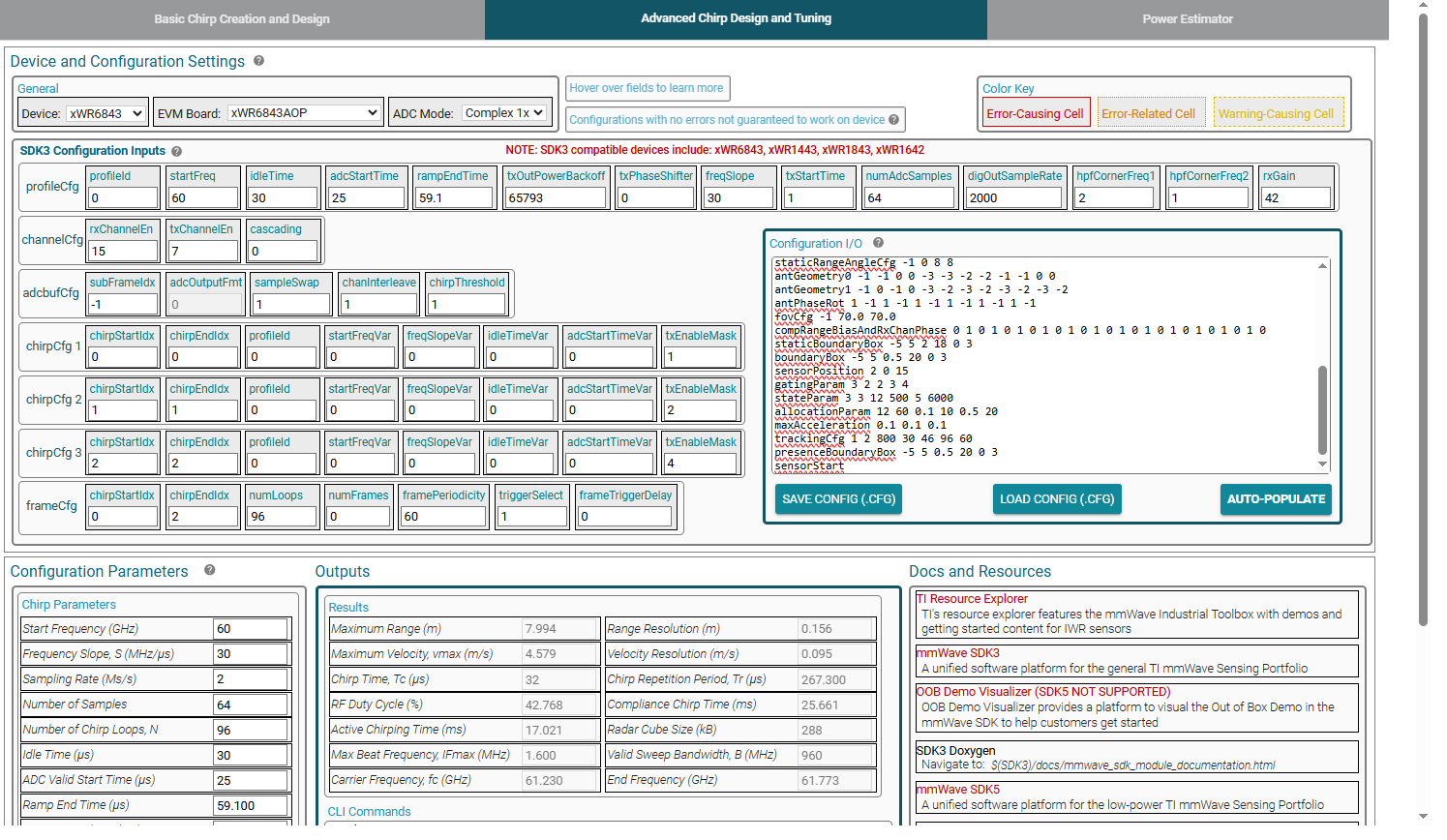
Also, can anyone tell me what software is being used to obtain sensor metrics based on the .cfg file shown in the previous post? That tool looks quite helpful.