Tool/software:
Hello,
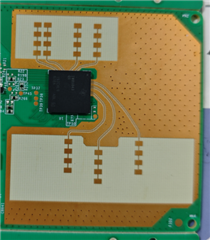
I am developing a millimeter-wave radar for the ROS system based on the Robotics example routines of radar_toolbox_3_10_00_05 using the IWR6843. I have designed a new sparse array antenna. When the TX and RX antennas are in the same horizontal plane, as shown in the figure below, the elevation angle and azimuth angle calculated by the Capon algorithm are correct.
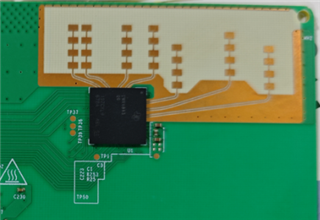
However, when the TX and RX antennas are not in the same horizontal plane, as shown in the figure below, and I set the antPhaseRot parameter in the cfg file to -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 , the elevation angle calculated by the Capon algorithm splits into multiple values. The abnormal values appear to be close to the elevation FOV value set in the fovCfg parameter. Could you please help analyze the possible cause? Thank you