Other Parts Discussed in Thread: IWRL6432BOOST, SYSCONFIG, IWRL6432AOP, UNIFLASH
Tool/software:
Hi,
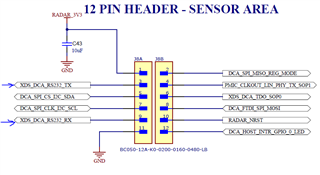
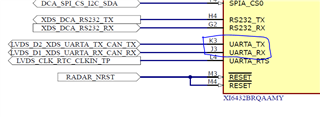
I am trying to setup UART to connect from my AOPEVM to send data to my ESP32, but I am not sure which pins on the board to use and how to set them up in the software? I cant seem to find a proper schematic/diagram that shows the correct mapping of the names of the pins on the board to the names of the pins labeled in the software.