


Other Parts Discussed in Thread: LDC1614, , LDC1612
Tool/software:
=== LDC1614 Sensor Initialization ===
L = 150.0 mH, C = 56.0 nF, Rs = 220.0 Ohm
f_refclk = 40.0 MHz
--- Parameters before calibration ---
Q factor: 7.44
Rp: 12175.3 Ohm
f_sensor: 1736.5 Hz
rcount: 47989 (0xBB75)
settlecount: 7140 (0x1BE4)
idrive_reg: 0 (0x0000)
--- Auto-Calibration ---
Calibration successful!
Original IDRIVE: 0 (0x0000)
Calibrated IDRIVE: 26624 (0x6800)
--- Parameters after calibration ---
Q factor: 7.44
Rp: 12175.3 Ohm
f_sensor: 1.7 kHz
rcount: 47989 (0xBB75)
settlecount: 7140 (0x1BE4)
idrive_reg: 26624 (0x6800)
=== Current LDC161X Configuration ===
CONFIG (0x1A): 0x1E01
- Active Channel: 0
- Sleep Mode: OFF
- RP Override: ON
- Sensor Select: ON
- Auto Amp Dis: ON
- Ref CLK Source: External
- INTB Disable: OFF
- High Current: OFF
- Reserved[5:0]: 0x01
MUX_CONFIG (0x1B): 0x0209
- Auto Scan En: OFF
- RR Sequence: 0x00
ERROR_CONFIG (0x19): 0x0001
- UR_ERR2OUT: OFF
- OR_ERR2OUT: OFF
- WD_ERR2OUT: OFF
- AH_ERR2OUT: OFF
- AL_ERR2OUT: OFF
- DRDY_2INT: ON
STATUS (0x18): 0x0008
- ERR_CHAN: 0
- ERR_UR: OK
- ERR_OR: OK
- ERR_WD: OK
- ERR_AH: OK
- ERR_AL: OK
- DRDY: Not Ready
--- Channel Configuration ---
Channel 0:
RCOUNT (0x08): 0xBB75 (47989)
SETTLE (0x10): 0x1BE4 (7140)
DIVIDER (0x14): 0x0003
- FIN_DIVIDER: 0
- FREF_DIVIDER: 3
IDRIVE (0x1E): 0x6B40
Channel 1:
RCOUNT (0x09): 0x0080 (128)
SETTLE (0x11): 0x0000 (0)
DIVIDER (0x15): 0x0000
- FIN_DIVIDER: 0
- FREF_DIVIDER: 0
IDRIVE (0x1F): 0x0000
Channel 2:
RCOUNT (0x0A): 0x0080 (128)
SETTLE (0x12): 0x0000 (0)
DIVIDER (0x16): 0x0000
- FIN_DIVIDER: 0
- FREF_DIVIDER: 0
IDRIVE (0x20): 0x0000
Channel 3:
RCOUNT (0x0B): 0x0080 (128)
SETTLE (0x13): 0x0000 (0)
DIVIDER (0x17): 0x0000
- FIN_DIVIDER: 0
- FREF_DIVIDER: 0
IDRIVE (0x21): 0x0000
=== Starting measurements ===
Format: [Count] Raw: (Data) | Filtered: (Data) | [UR|OR|WD|AE]
STATUS (0x0048)
[000001] 37812 | Frequency: 1878 Hz| [0|0|0|0]
STATUS (0x0048)
[000002] 38876 | Frequency: 1930 Hz| [0|0|0|0]
STATUS (0x0048)
[000003] 37100 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000004] 36390 | Frequency: 1807 Hz| [0|0|0|0]
STATUS (0x0048)
[000005] 37100 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000006] 36745 | Frequency: 1825 Hz| [0|0|0|0]
STATUS (0x0048)
[000007] 38875 | Frequency: 1930 Hz| [0|0|0|0]
STATUS (0x0048)
[000008] 35690 | Frequency: 1772 Hz| [0|0|0|0]
STATUS (0x0048)
[000009] 35324 | Frequency: 1754 Hz| [0|0|0|0]
STATUS (0x0048)
[000010] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000011] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000012] 37454 | Frequency: 1860 Hz| [0|0|0|0]
STATUS (0x0048)
[000013] 37454 | Frequency: 1860 Hz| [0|0|0|0]
STATUS (0x0048)
[000014] 35324 | Frequency: 1754 Hz| [0|0|0|0]
STATUS (0x0048)
[000015] 38164 | Frequency: 1895 Hz| [0|0|0|0]
STATUS (0x0048)
[000016] 38519 | Frequency: 1913 Hz| [0|0|0|0]
STATUS (0x0048)
[000017] 35679 | Frequency: 1772 Hz| [0|0|0|0]
STATUS (0x0048)
[000018] 38164 | Frequency: 1895 Hz| [0|0|0|0]
STATUS (0x0048)
[000019] 38493 | Frequency: 1911 Hz| [0|0|0|0]
STATUS (0x0048)
[000020] 38519 | Frequency: 1913 Hz| [0|0|0|0]
STATUS (0x0048)
[000021] 37118 | Frequency: 1843 Hz| [0|0|0|0]
STATUS (0x0048)
[000022] 36567 | Frequency: 1816 Hz| [0|0|0|0]
STATUS (0x0048)
[000023] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000024] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000025] 38164 | Frequency: 1895 Hz| [0|0|0|0]
STATUS (0x0048)
[000026] 37809 | Frequency: 1877 Hz| [0|0|0|0]
STATUS (0x0048)
[000027] 37454 | Frequency: 1860 Hz| [0|0|0|0]
STATUS (0x0048)
[000028] 36389 | Frequency: 1807 Hz| [0|0|0|0]
STATUS (0x0048)
[000029] 35315 | Frequency: 1754 Hz| [0|0|0|0]
STATUS (0x0048)
[000030] 37765 | Frequency: 1875 Hz| [0|0|0|0]
STATUS (0x0048)
[000031] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000032] 36034 | Frequency: 1789 Hz| [0|0|0|0]
STATUS (0x0048)
[000033] 37277 | Frequency: 1851 Hz| [0|0|0|0]
STATUS (0x0048)
[000034] 34977 | Frequency: 1737 Hz| [0|0|0|0]
STATUS (0x0048)
[000035] 34081 | Frequency: 1692 Hz| [0|0|0|0]
STATUS (0x0048)
[000036] 38140 | Frequency: 1894 Hz| [0|0|0|0]
STATUS (0x0048)
[000037] 38874 | Frequency: 1930 Hz| [0|0|0|0]
STATUS (0x0048)
[000038] 36904 | Frequency: 1833 Hz| [0|0|0|0]
STATUS (0x0048)
[000039] 38519 | Frequency: 1913 Hz| [0|0|0|0]
STATUS (0x0048)
[000040] 36744 | Frequency: 1825 Hz| [0|0|0|0]
STATUS (0x0048)
[000041] 39229 | Frequency: 1948 Hz| [0|0|0|0]
STATUS (0x0048)
[000042] 36034 | Frequency: 1789 Hz| [0|0|0|0]
STATUS (0x0048)
[000043] 34969 | Frequency: 1736 Hz| [0|0|0|0]
STATUS (0x0048)
[000044] 38874 | Frequency: 1930 Hz| [0|0|0|0]
STATUS (0x0048)
[000045] 37454 | Frequency: 1860 Hz| [0|0|0|0]
STATUS (0x0048)
[000046] 37809 | Frequency: 1877 Hz| [0|0|0|0]
STATUS (0x0048)
[000047] 35679 | Frequency: 1772 Hz| [0|0|0|0]
STATUS (0x0048)
[000048] 36047 | Frequency: 1790 Hz| [0|0|0|0]
STATUS (0x0048)
[000049] 35679 | Frequency: 1772 Hz| [0|0|0|0]
STATUS (0x0048)
[000050] 37810 | Frequency: 1878 Hz| [0|0|0|0]
STATUS (0x0048)
[000051] 36745 | Frequency: 1825 Hz| [0|0|0|0]
STATUS (0x0048)
[000052] 37100 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000053] 35325 | Frequency: 1754 Hz| [0|0|0|0]
STATUS (0x0048)
[000054] 38165 | Frequency: 1895 Hz| [0|0|0|0]
STATUS (0x0048)
[000055] 36390 | Frequency: 1807 Hz| [0|0|0|0]
STATUS (0x0048)
[000056] 36035 | Frequency: 1789 Hz| [0|0|0|0]
STATUS (0x0048)
[000057] 39230 | Frequency: 1948 Hz| [0|0|0|0]
STATUS (0x0048)
[000058] 35325 | Frequency: 1754 Hz| [0|0|0|0]
STATUS (0x0048)
[000059] 37063 | Frequency: 1840 Hz| [0|0|0|0]
STATUS (0x0048)
[000060] 40650 | Frequency: 2019 Hz| [0|0|0|0]
STATUS (0x0048)
[000061] 37118 | Frequency: 1843 Hz| [0|0|0|0]
STATUS (0x0048)
[000062] 36744 | Frequency: 1825 Hz| [0|0|0|0]
STATUS (0x0048)
[000063] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000064] 35324 | Frequency: 1754 Hz| [0|0|0|0]
STATUS (0x0048)
[000065] 37809 | Frequency: 1877 Hz| [0|0|0|0]
STATUS (0x0048)
[000066] 38493 | Frequency: 1911 Hz| [0|0|0|0]
STATUS (0x0048)
[000067] 40472 | Frequency: 2010 Hz| [0|0|0|0]
STATUS (0x0048)
[000068] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000069] 37809 | Frequency: 1877 Hz| [0|0|0|0]
STATUS (0x0048)
[000070] 36728 | Frequency: 1824 Hz| [0|0|0|0]
STATUS (0x0048)
[000071] 35679 | Frequency: 1772 Hz| [0|0|0|0]
STATUS (0x0048)
[000072] 35324 | Frequency: 1754 Hz| [0|0|0|0]
STATUS (0x0048)
[000073] 37809 | Frequency: 1877 Hz| [0|0|0|0]
STATUS (0x0048)
[000074] 37099 | Frequency: 1842 Hz| [0|0|0|0]
STATUS (0x0048)
[000075] 36761 | Frequency: 1825 Hz| [0|0|0|0]
STATUS (0x0048)
[000076] 37455 | Frequency: 1860 Hz| [0|0|0|0]
STATUS (0x0048)
[000077] 38520 | Frequency: 1913 Hz| [0|0|0|0]
STATUS (0x0048)
[000078] 35502 | Frequency: 1763 Hz| [0|0|0|0]
STATUS (0x0048)
[000079] 36745 | Frequency: 1825 Hz| [0|0|0|0]
STATUS (0x0048)
[000080] 35306 | Frequency: 1753 Hz| [0|0|0|0]
STATUS (0x0048)
[000081] 37455 | Frequency: 1860 Hz| [0|0|0|0]
STATUS (0x0048)
[000082] 35325 | Frequency: 1754 Hz| [0|0|0|0]

Hi,
I'm using the LDC1614EVM with a 150 mH coil and 56 nF cap (around 1.7 kHz resonance). I attached to a STM32 controller to read and configure the LDC1614 over jumpers.
The sensor runs in single-channel mode (CH0 only), calibrated IDRIVE is 0x6800, and I use external 40 MHz ref clock.
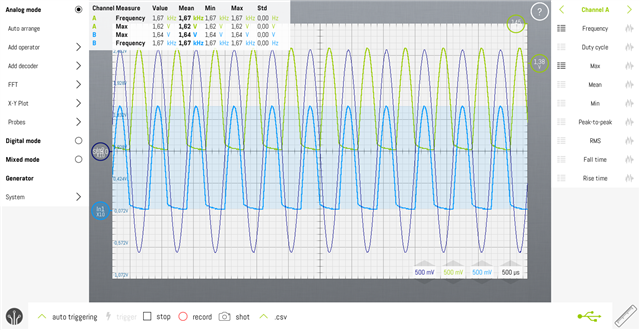
Even with stable test conditions, I see the measured frequency drifting slowly after ~10 minutes, but sensors frequency didn't shift. Also, the values fluctuate up/down by 100–200 Hz all the time (see attached oscilloscope screenshot and log). I tried the GUI. It behaves similar to my setup.
I tried different rcount and settlecount, but the fluctuation doesn’t go away.
Any ideas what could cause this drift and instability?
Settings are in the uploaded measurement file.
Thanks!

