Tool/software:
Currently using Out of Box Demo image and mmWave_Demo_Visualizer 3.6.0 to obtain the .cfg file. Device is RS-1843AOPU.
Our requirement is:
- Radar direction: forward-facing only, 30 meters or greater distance
- Check if there's enough space for our 4m wide equipment to get through
We only care about two things:
- How far we can detect obstacles
- Whether obstacles are present
We don't care about range resolution, angle information, velocity, or other information.
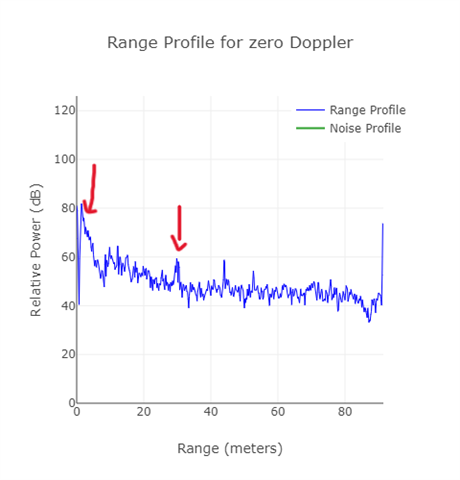
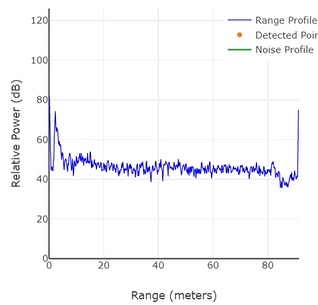
However, we currently cannot accurately detect obstacles at 30 meters. Our test objects are a car and a wall.
What demo image should I choose and what .cfg configuration would be better for achieving this?
Regards,
% ***************************************************************
% Created for SDK ver:03.06
% Created using Visualizer ver:3.6.0.0
% Frequency:76
% Platform:xWR18xx_AOP
% Scene Classifier:best_range_res
% Azimuth Resolution(deg):30 + 60
% Range Resolution(m):0.179
% Maximum unambiguous Range(m):75.17
% Maximum Radial Velocity(m/s):0.32
% Radial velocity resolution(m/s):0.04
% Frame Duration(msec):100
% RF calibration data:None
% ***************************************************************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 76 1491 7 50 0 0 20 1 512 12190 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
frameCfg 0 1 16 0 100 1 0
lowPower 0 0
guiMonitor -1 1 1 0 0 0 1
cfarCfg -1 0 2 8 4 3 0 15 1
cfarCfg -1 1 0 4 2 3 1 15 1
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 5 103 0
CQSigImgMonitor 0 127 8
analogMonitor 0 0
aoaFovCfg -1 -5 5 -5 5
cfarFovCfg -1 0 0 73.14
cfarFovCfg -1 1 -0.32 0.32
calibData 0 0 0
sensorStart