


Tool/software:
Hi expert,
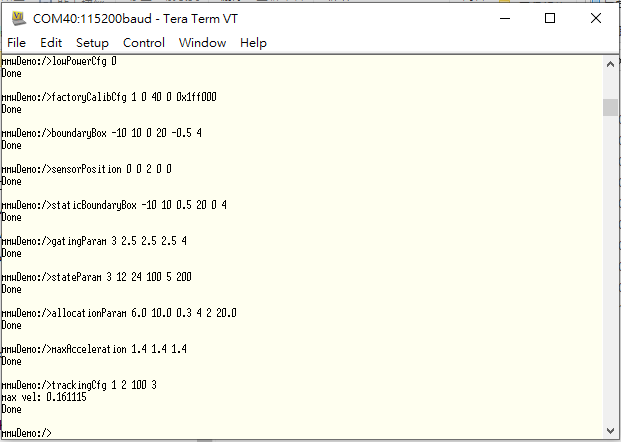
Customer report configurations of tracking are weird in the newly upgrade SDK 5.5.4.2. They use IWRL6432 EVM burned with SDK v5.5.4.2 Motion and Presence Detection with attached configuration. Turn on the radar and see the input of the maximum and resolution of velocity in the tracking configuration by using the CLI_write function to output the observed the result.
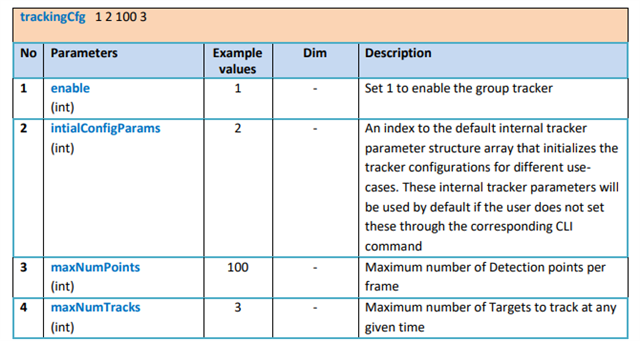
sensorStop 0 channelCfg 7 3 0 chirpComnCfg 8 0 0 256 4 25 0 chirpTimingCfg 32 20 0 37 57.75 frameCfg 128 0 8000 1 100.0 0 antGeometryCfg 0 0 1 1 0 2 0 1 1 2 0 3 2.542 3.559 guiMonitor 1 0 0 0 0 0 0 0 1 0 1 sigProcChainCfg 16 8 1 2 4 4 0 15.0 1 cfarCfg 2 8 4 3 0 6.0 0 0.5 0 1 1 1 aoaFovCfg -75 75 -45 45 rangeSelCfg 0.1 20.0 clutterRemoval 1 measureRangeBiasAndRxChanPhase 0 1.0 0.2 compRangeBiasAndRxChanPhase 0.00 1.00 0.00 -1.00 0.00 1.00 0.00 -1.00 0.00 1.00 0.00 -1.00 0.00 adcDataSource 0 adcData_1_000.bin adcLogging 0 lowPowerCfg 0 factoryCalibCfg 1 0 40 0 0x1ff000 boundaryBox -10 10 0 20 -0.5 4 sensorPosition 0 0 2 0 0 staticBoundaryBox -10 10 0.5 20 0 4 gatingParam 3 2.5 2.5 2.5 4 stateParam 3 12 24 100 5 200 allocationParam 6.0 10.0 0.3 4 2 20.0 maxAcceleration 1.4 1.4 1.4 trackingCfg 1 2 100 3 presenceBoundaryBox -10 10 0.5 20 0 4 microDopplerCfg 1 0 0.5 0 1 1 12.5 87.5 1 classifierCfg 1 3 4 profileSwitchCfg 0 25 25 baudRate 115200 sensorStart 0 0 0 0
in SDK 5.5.4.2, the maximum velocity is calculated itself rather than inputting by the tracking configurations.
“config.maxVelocitymps = (float) ((10 * (SPEED_OF_LIGHT_IN_METERS_PER_SEC/(4 * carrierFrequencyMhz * chirpRepetitionPeriodus))) * 0.1f);”
as you can see
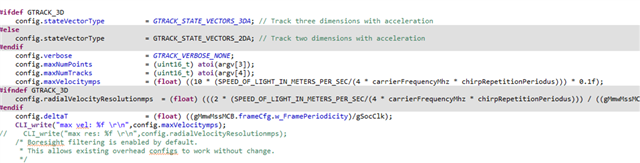

The radar outputs the value of config.maxVelocitymps, and it is 0.16115 m/s which is not the correct value of maximum velocity. The configuration is having max velocity of around 11 m/s.
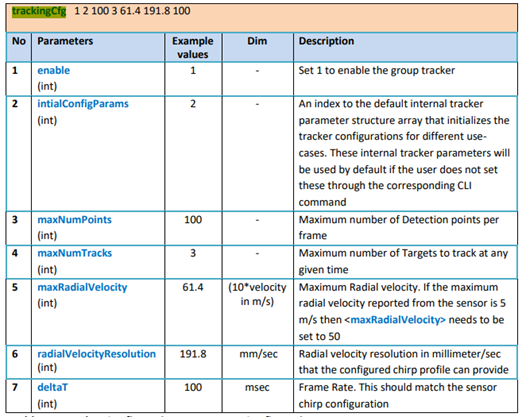
Note that, in previous version (v5.5.3.0), the radar does not calculate the maximum and resolution of velocity in the tracking configuration itself, instead, the velocity info is inputted by using the tracking configuration. Below is the reference of the tracking configuration example in the previous SDK v5.5.3.0.
Customer would like to know the reason why we change the calculation? and what will be impacted?
Regards
Andre

