


Hi,
I have got some questions about "High Ambient" process of OPT9221/8241 from my customer.
Could you tell me your advice?
Q1) Shutter function
OPT8241 has a shtter function to make the sensor work under sunlight. (prevent from saturating)
Could you tell me how does it work?
There is no description about the shutter on the datasheet.
And do you have something evaluation data when this function is ON/OFF?
Q2) High Ambient control
To use OPT9221/8241 under the conditon of "High Ambient" like under the sunlight, we need to control "Integration duty cycle", "Sub-frame number"
and "Shutter", I think.
That is to say,
- By reducing the duty cycle, we can prevent the sensor from surturating.
- By increasing the number of "Sub-Frame" (= increasing intergration time), then we can improve the S/N.
- As the reset is done by every "Quad stage", the charged data of the previous sampling is removed and then S/N is also improved.
Is my idea correct?
But I do not understand how is the shutter doing role in data acquisition stage...
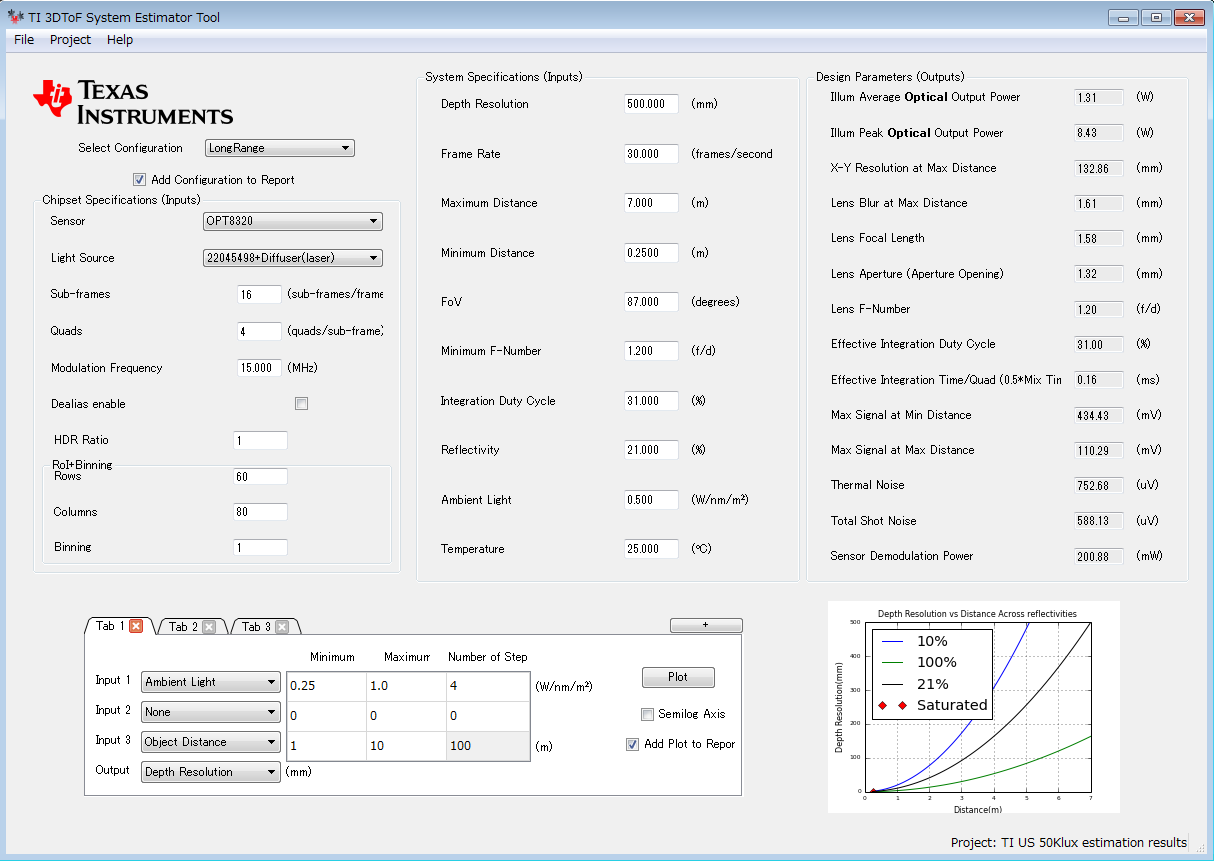
Q3) SYSTEM ESTIMATOR TOOL
About the tool, the "Ambient light" setting is "1.000W/nm/m2" by default under the "High Ambient" configuration as below.
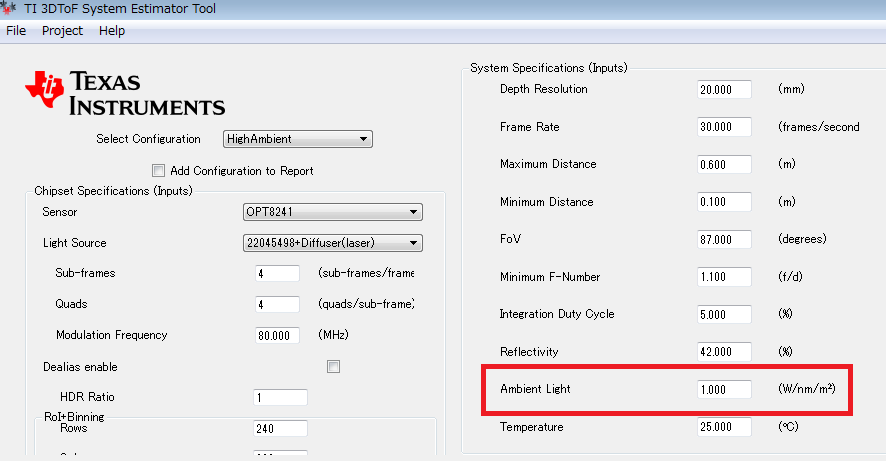
Can I understand that this value is the same as "100K lux" as under the strong sunlight?
Q4) The relation between "Frame", "Sub-Frame" and "Quads"
Q4-1) Could you provide me the timing chart of these signals to understand well?
Q4-2) I do not understand well the relation of these signals, to my regret.
I suppose, as a result, the number of "total Quads/Frame" is important.
For example, the total quads number of both case1 and case2 are same, 160.
What is the different between both cases?
case1) Frame rate : 10, Sub-Frame : 4, Quads : 4
case2) Frame rate : 5, Sub-Frame : 8, Quads : 4
Q5) evaluation data of EVM
Do you have anything measurement data (High Ambient and not high ambient) by using EVM to support to design?
Thank you very much for your support!
Best Regards,





{kind=link}