


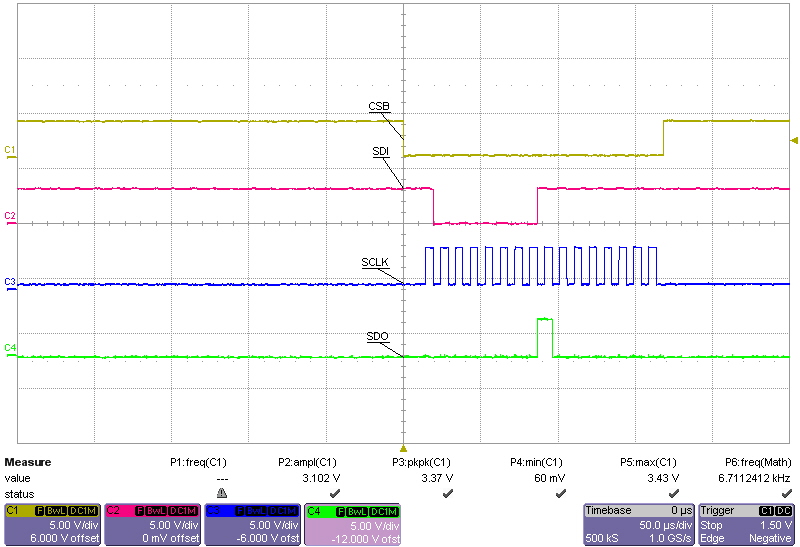
Hi, using an LDC1000 (sure of that, because the marking is LDC1000 with no suffix), is it possible that reading device ID (address 0x00) we get 0x80 and not 0x84 as per LDC1000 datasheet ?
bye, Vasco (relevant timing diagram attached)
Hi, using an LDC1000 (sure of that, because the marking is LDC1000 with no suffix), is it possible that reading device ID (address 0x00) we get 0x80 and not 0x84 as per LDC1000 datasheet ?
bye, Vasco (relevant timing diagram attached)

