Other Parts Discussed in Thread: OPT8241,
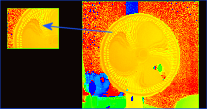
We are observing artifacts when imaging moving objects and require some assistance in understanding how to eliminate these. Using the Voxel viewer and the TI OPT8241 eval kit with default parameters and an unambiguous range of 3 m, depth maps appear to be computed at 4 different exposure times (see attached images below of a fan blade). There is a parameter mentioned in the data sheet (lumped_dead_time) which potentially could be used to eliminate the distribution of exposure gaps; however this parameter does not appear to be supported in the most recent parameter set that is exposed through Voxel viewer. Questions:
1. Is the parameter lumped_dead_time supported for the OPT9221, and if so, could it be used to eliminate the issue we are observing?
2. Are there other parameters or approaches that you would recommend so that we can get depth measurements estimated over a single time interval rather than 4 as we are observing?