


Our application requires computing range to a single object with high precision, similar to what is shown in the following demo.
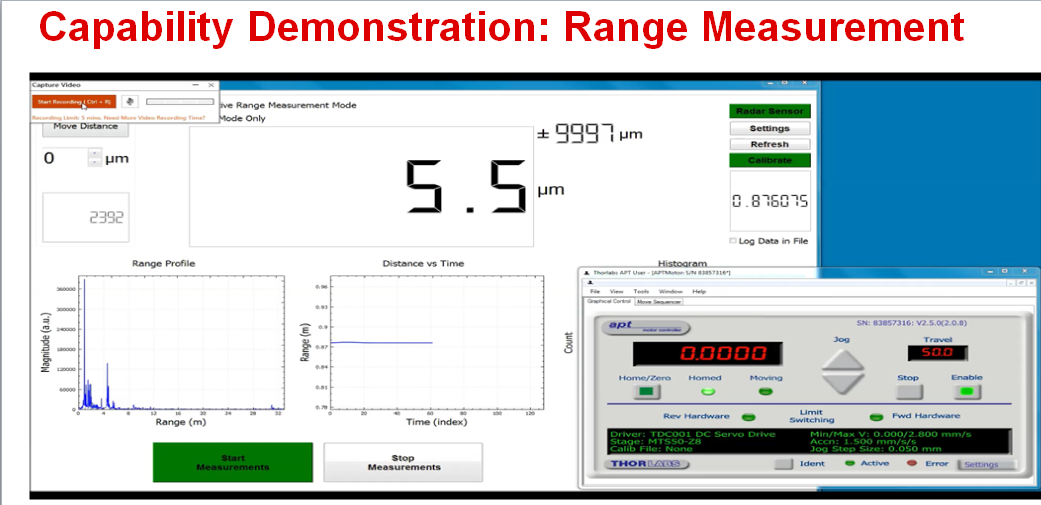
We do not need micrometer precision as shown above, however 5mm would be desirable. Can this be demonstrated with the current SDK? If so, what parameters should be used?
