Other Parts Discussed in Thread: AWR1243
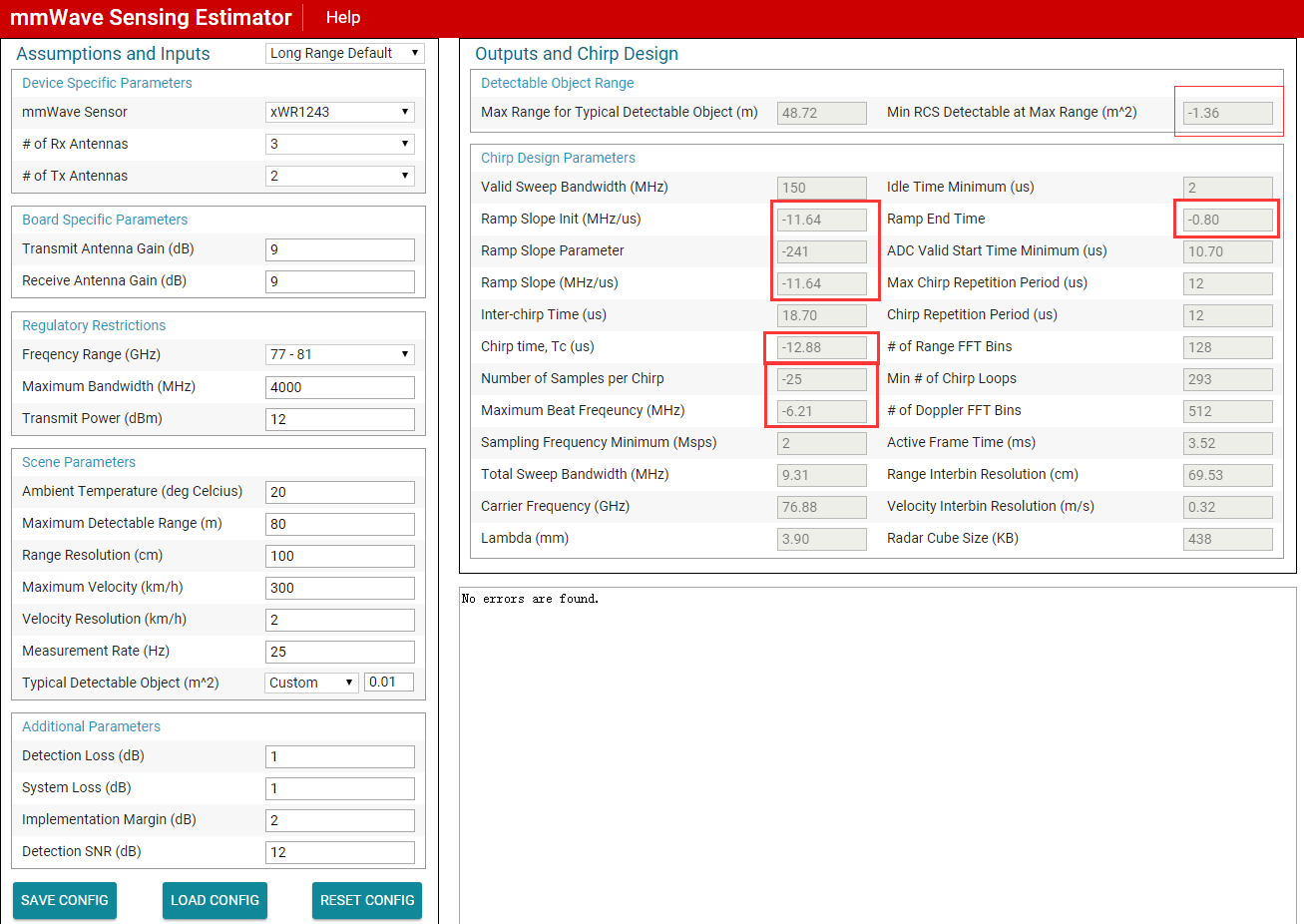
There is an object (with 70m range and 300kmph velocity)away from mmWave radar and its detectable object size is about 0.01 m^2.
My only concern is to achieve range information.
(1) Does this high speed have an effect on range measuring?
(2) How can I use IWR1443boost to realize my concern under this high speed?
Thank you for your help.
-Will