Other Parts Discussed in Thread: IWR1443, UNIFLASH
Tool/software: TI-RTOS
Hi,
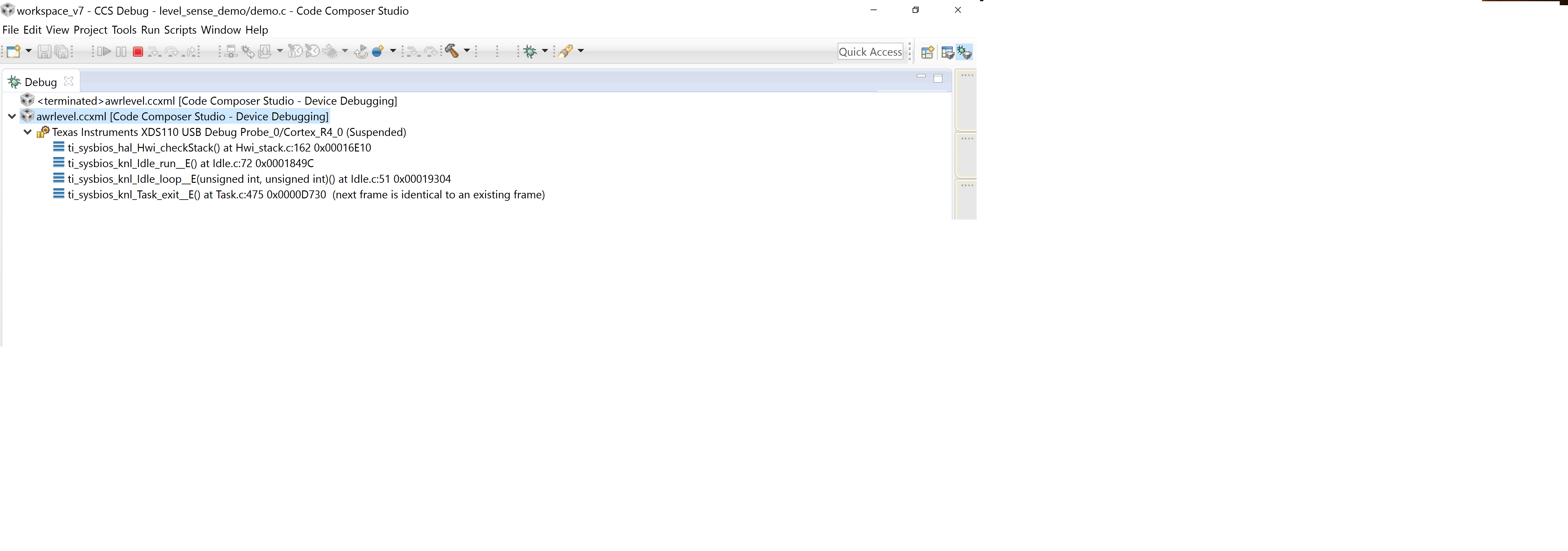
I was trying the level sense demo and added break points to see the distance an object was away from the sensor. I flashed the sensors using the ccs_debug_mss so i could understand how the code works. The code give me a distance value at the breakpoint. When i do a CPU reset using CCS or restart the debug so i can gain a new range value from my sensor, instead of going to the breakpoint it gets stuck in a file called idle.c where the code is trapped in a while loop. Are there any ways around this problem
Thanks in advanced
/*The breakpoint in demo.c file located in level_sense_demo directory*/
//Now compute the distances of the top N.
for (idx = 0; idx < DEMO_NUM_RESULTS; idx ++)
{
results->distance[idx] = (float)((max_bin[idx]) * DEMOCFG_RANGE_RES); //DEMOCFG_RANGE_RES
results->power_sqr[idx] = max_power[idx];
}
/*Idle.c file*/
#include <xdc/std.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/hal/Core.h>
#include <ti/sysbios/hal/Hwi.h>
#include "package/internal/Idle.xdc.h"
/*
* ======== Idle_loop ========
*/
Void Idle_loop(UArg arg1, UArg arg2)
{
while (TRUE) {
Idle_run();
}
}
/*
* ======== Idle_run ========
*/
Void Idle_run()
{
Int i;
if (BIOS_smpEnabled == TRUE) {
UInt coreId = Core_getId();
for (i = 0; i < Idle_funcList.length; i++) {
if (Idle_coreList.elem[i] == coreId) {
Idle_funcList.elem[i]();
}
}
}
else {
for (i = 0; i < Idle_funcList.length; i++) {
Idle_funcList.elem[i]();
}
}
}