Other Parts Discussed in Thread: IWR1642BOOST, IWR1443, IWR1642
Hi team,
The customer has some questions for IWR1443BOOST and IWR1642BOOST.
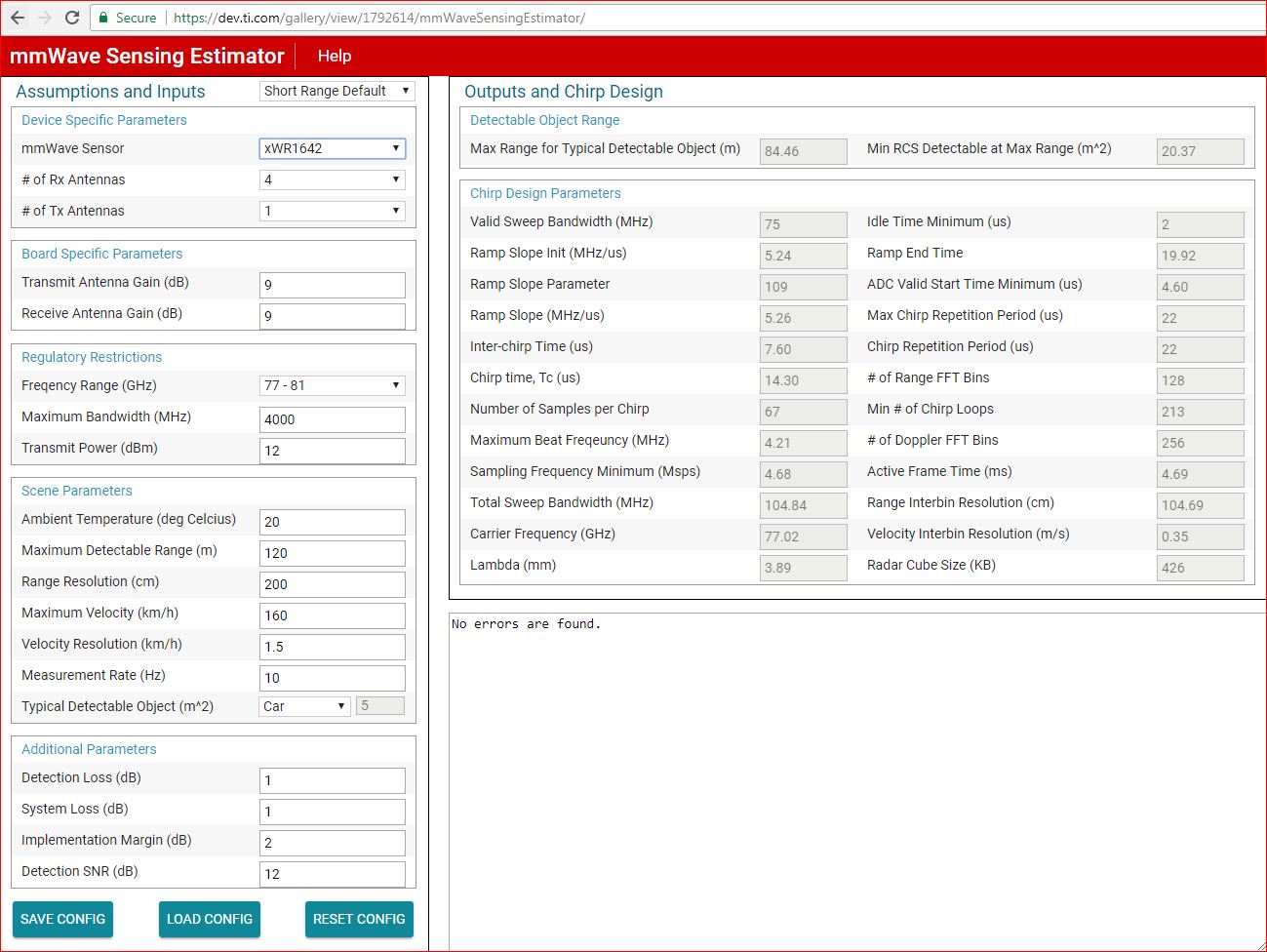
Q1: What are the differences in mobility support? The customer will test moving objects up to 160 km / h. Which device can meet his requirement?
Q2: Do the IWR1443BOOST and IWR1642BOOST have a recommended docking high-power outdoor single antenna?
Q3: The customer would like to carry out secondary development. What degree can the two boosts be allowed to develop?
Best Wishes,
Mickey Zhang
Asia Customer Support Center
Texas Instruments