Other Parts Discussed in Thread: AWR1243BOOST, AWR1642, IWR1443, AWR1243
Hello,
For a personal project I'm considering using an AWR1443 (or other AWR if they can fit my needs).
My goal is to detect Bragg patterns at 5~20m away from the radar.
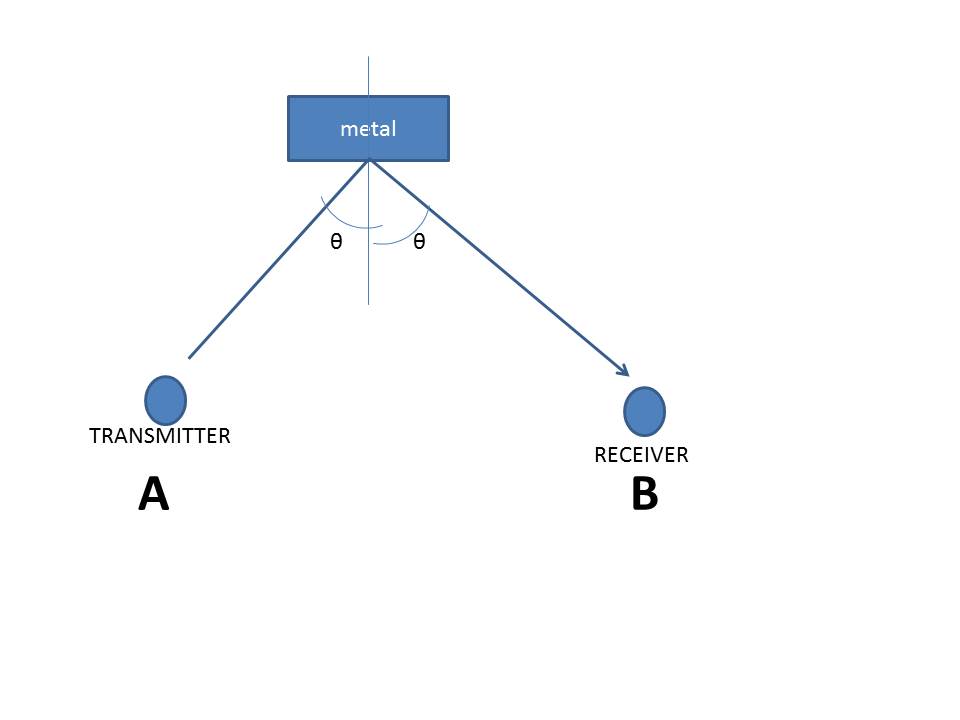
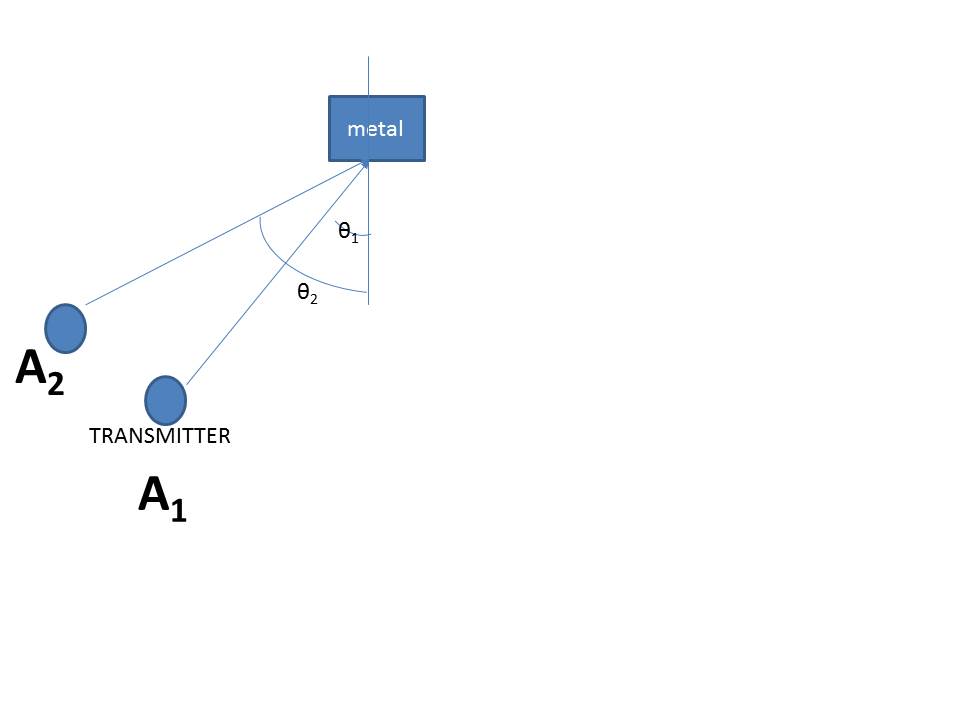
As a reminder Bragg pattern follow Bragg's low of diffraction as
Theta_n = Asin(n * Lambda / 2 * Surface_periodicity)
As my surface periodicity is L = 0,5 cm an millimeter wave radar should be able to detect it.
Is it really able to?
On a side note I could find the horizontal FoV of the radar but the informations about the vertical FoV are missing, can someone direct me to where to find the vertical fov?