Other Parts Discussed in Thread: SYSBIOS
Hello;
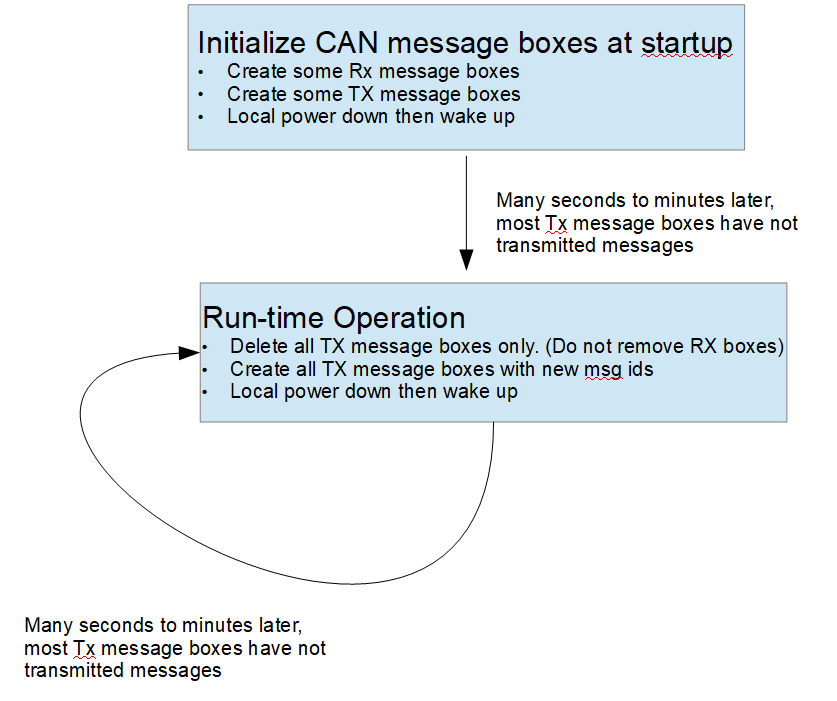
I am trying to change the message ID for CAN messages AFTER they have been initially configured. I am referring to the msgIdentifier field in the CAN_DCANMsgObjCfgParams structure for an existing message box.
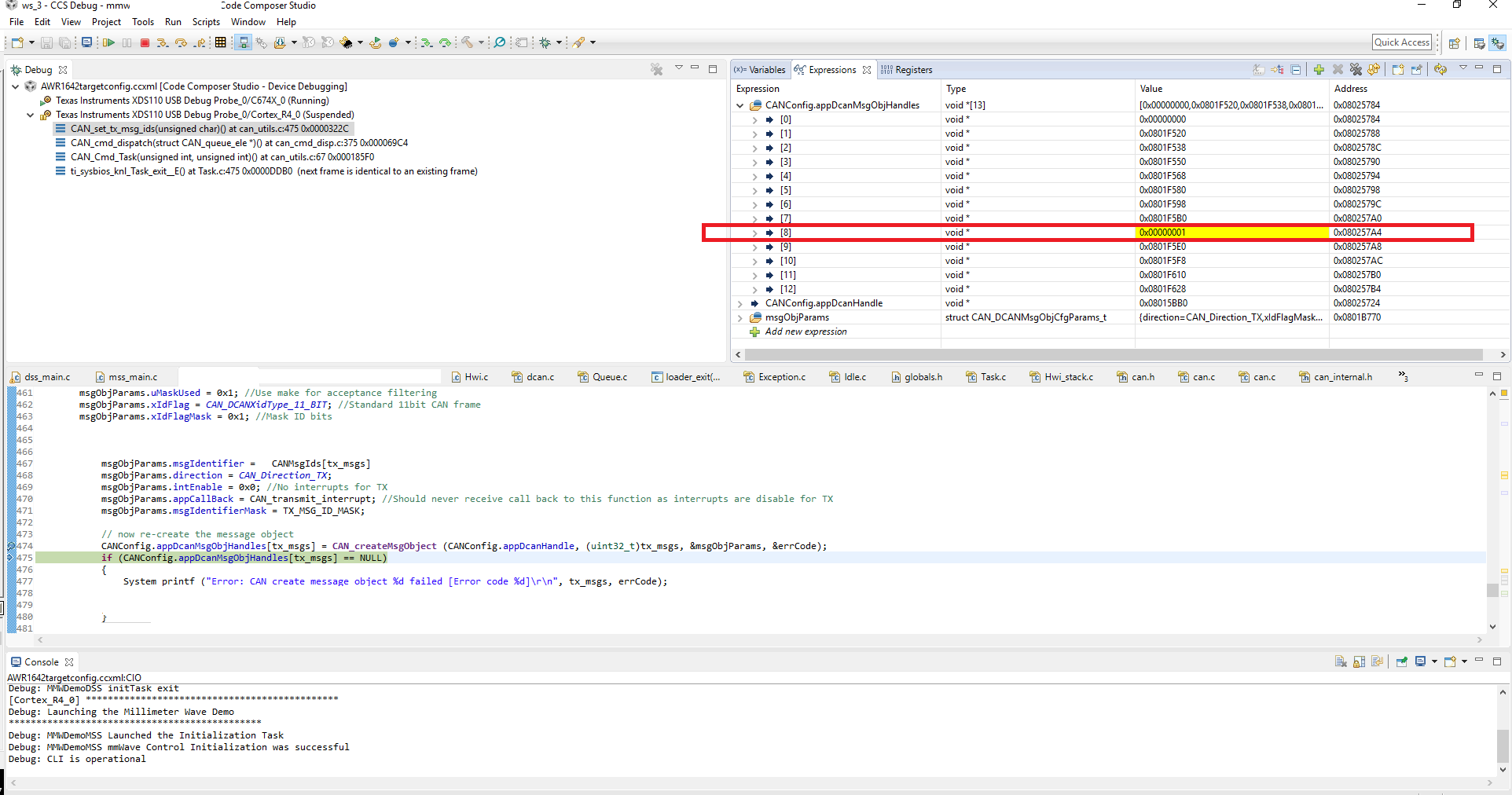
I am able to initialize CAN and send and receive messages. When I wish to change the msgIdentifier during runtime, this appears to work the first time and I can send and receive CAN messages using the new message ID. The second time I try to change the message ID for a message box, it fails.
What is the recommended method for modifying the msgIdentifier field for a message box during runtime? This is required, for example, for J1939 CAN specification where information is encoded into the message ID which will change over time. Need to modify the msgIdentifier for a message box many times during the power-on cycle.
There does not appear to be a CAN_modifyMsgObject() or equivalent. There is a driver function DCANConfigMsgObj() which is used by CAN_createMsgObject() but this is only able to change the message ID once as mentioned above. Changing the message ID a second time does not work.
Thanks in advance,
Joe Shidle