Other Parts Discussed in Thread: PGA460,
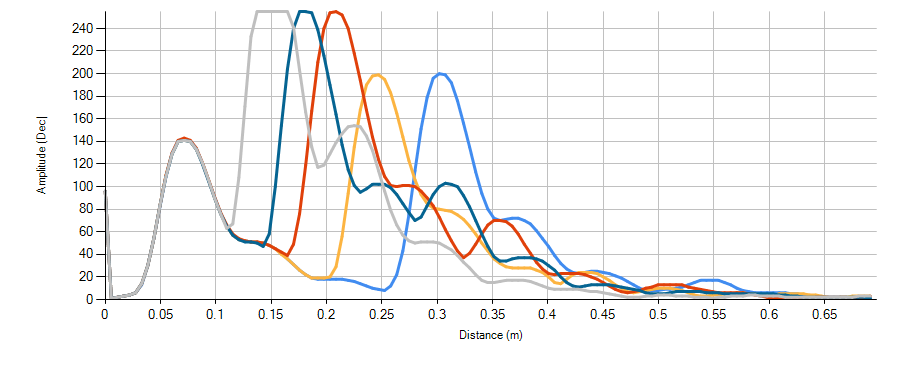
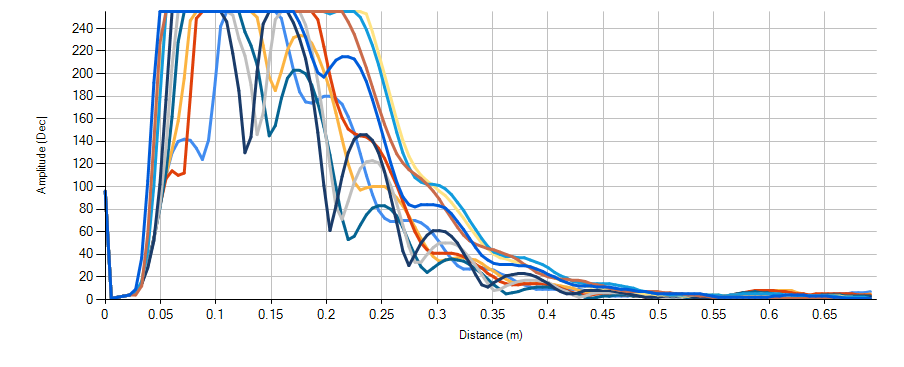
I'm using PGA460 with transformer driven method. To decrease the minimum measurable distance I wanted to try bi-static mode. The first issue was to reduce acoustic coupling. But there also seems to be a considerable electric coupling between OUT and IN signal. How can I reduce this coupling. Actually I can't get a benefit from using bi-static mode.