Customer has done a fair bit of testing of the AWR1642EVM and noticed that the detection range is not good unless the radar is pointed up or down at a significant angle (~15-25 degrees above or below horizontal). However, based on the EVM datasheet antenna pattern, we were expecting that the best performance would be with the radar antenna pointed directly at the object.
The radar was used with a pan-tilt unit on a wire cart to generate the data.
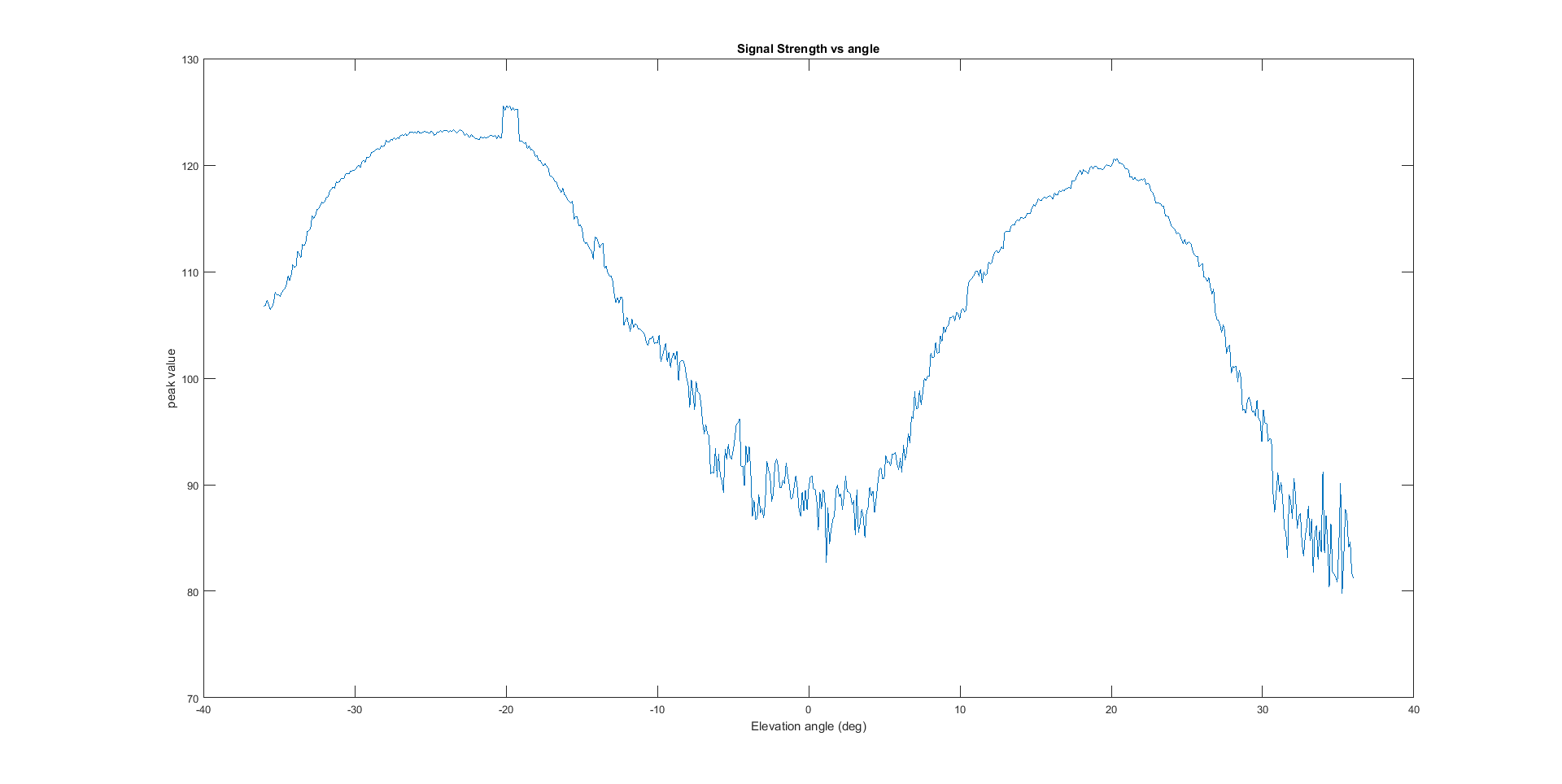
I’ve attached an image corresponding to an elevation sweep we performed of the radar from -36 to 36 degrees with a stationary car at 40m, perpendicular to the radar. This plot was generated from a range FFT bin corresponding to the location of the vehicle versus time. The radar was swept manually using a pan-tilt unit, hence the change in angle is reasonably constant but not completely uniform.
We’ve also found a E2E forum post showing similar findings to what we’ve observed with the blue curve (Rev A board, which we have) versus what we were expecting to see on the red curve (Rev E1 board). https://e2e.ti.com/support/sensor/mmwave_sensors/f/1023/p/606010/2231194
Would you have any insight as to why the car would show up as two peaks instead of one?
Can TI confirm that this is expected behavior for the AWR1642BOOST Rev A EVM board/antenna configuration?
If so, would you be able to provide a more accurate TX gain value (output power + antenna gain) for a given angle?
Please advise.
Thanks,
Mark