

Customer was able to confirm that single target detection as pretty good. With nothing but anechoic foam in the field of view, it had a fair excess gain for a human for a long range.
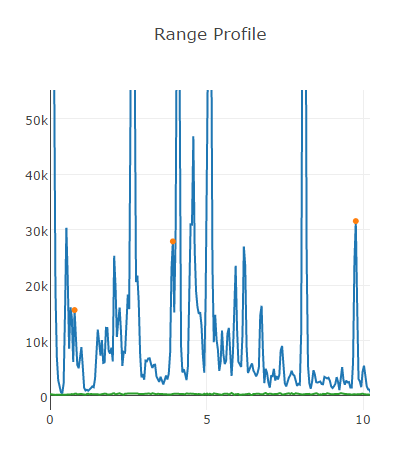
However, the noise generated by other targets becomes an issue. In the plot below, a target off the left at 3m and a target straight ahead at 4m and a targets off to the right at 5m is present. The 8m target is a 1st harmonic of the 4m target.
The targets generate a lot of noise in both directions (angle and distance dimensions). This raises the noise floor all around the targets. So once you have a strong target in the field of view, now in order to detect a weak target (human) somewhere, it must have >40k amplitude counts instead of the 4k amplitude counts required when no other targets were in the field of view.
It appears that the only way to effectively work with multiple targets is to use speed information and track them. But if multiple targets are not moving this doesn’t work.
How do we explain this behavior?
Regards,
Mark
