Other Parts Discussed in Thread: MMWAVE-SDK
Goal: To take the mmwave demo software and start modifying it to function for my purposes.
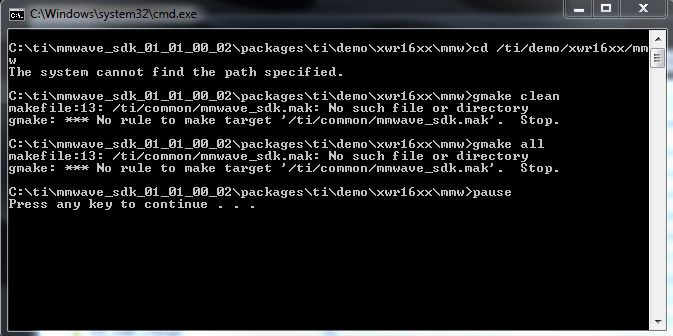
I have CCS and downloaded the SDK demo lab 1.6.2 and followed the readmes to build and flash my device. I have verified its functionality with the web visualizer. I am now at a point where I would like to start tweaking software, but am a bit lost on where to start. The project is only a couple *.c files of multiple thousand lines each and I can't find documentation that further explains the demo software structure.
I suppose I am hoping there is some recommended way to start breaking down and understanding the actual software to get the mmwave running some basic functionality. Or will I need to dig through these large *.c files in this project and just crossreference to the doxygens and start mapping it out myself?