Tool/software: Linux
Hi,
I am trying to set up the ROS environment following the instructions in the TI mmWave ROS Driver Setup Guide. Ubuntu 16.04 Virtual Machine is installed on the windows, my installed software version is:
ubuntu-16.04.3-desktop-amd64.iso
VMware-player-14.1.1-7528167.exe
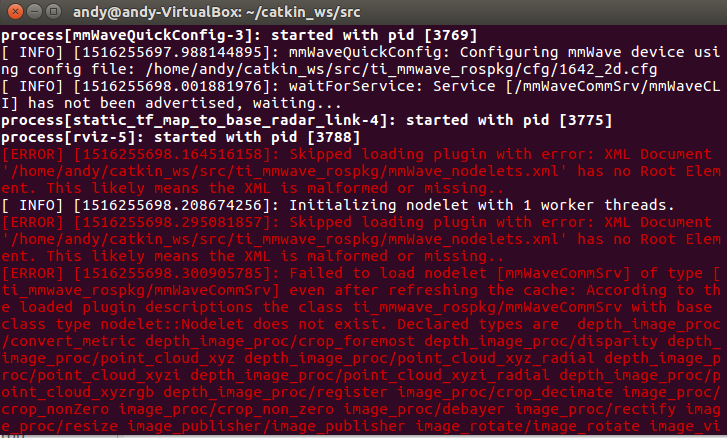
Before install ROS, I checked the virtual machine network and share-folder can work well, power off the virtual machine then it can power on well. But after executing the instruction in below link to install the kinetic ROS, power off the virtual machine, it cannot restart again, and it reminds information as below figure.
http://wiki.ros.org/kinetic/Installation/Ubuntu
Then click ok for next to choose the "try running with default graphical mode", the virtual machine screen is black and cannot enter the login interface. I removed the machine and tried again, but the issue is same. Would u pls help instruct me how to solve it and make me continue? Look forward to your comments and greatly thanks.

BR,
Andy