


Hi,
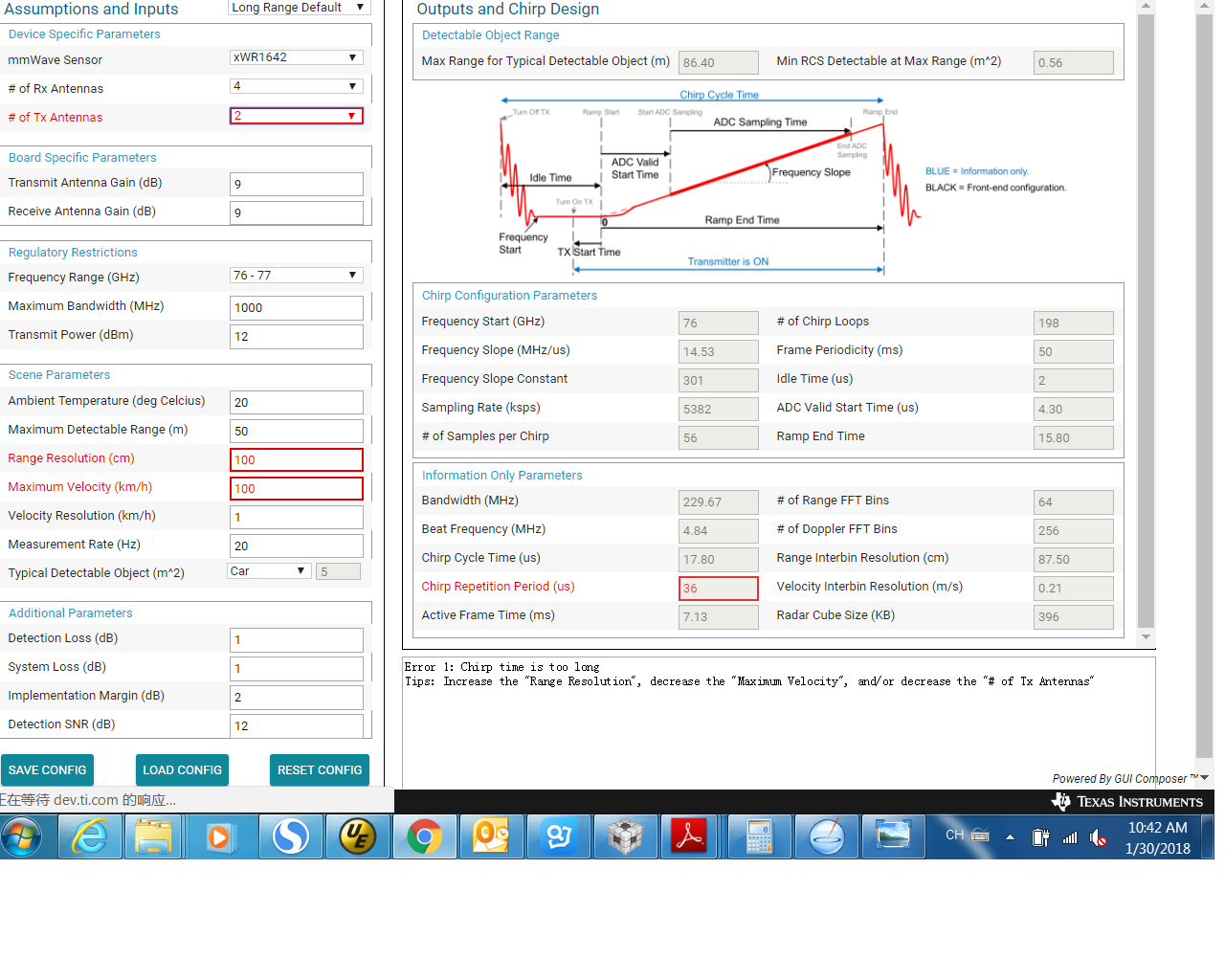
Using the mmwave sensing estimator to get the chirp configuration as below figure, it reminded the chirp period is too long, but based on my calculation all the parameters are correct, would u pls help let me know why it reminded such error, any limitation?
Andy
