


Tool/software: Linux
Hi all,
I have successfully built the ROS environment and checked the Point Cloud Visualization demo. When running the Autonomous Robot Navigation with ROS, I am getting the status error with Robot Model in RViz visualization window.
I have ran the following commonds in Remote laptop-
1) roslaunch turtlebot_bringup minimal.launch
Then
2) roslaunch turtlebot_teleop keyboard_teleop.launch
Then
3) roslaunch turtlebot_mmwave_launchers radar_mapping.launch
Then
4)rosrun rviz rviz -d ~/catkin_ws/src/ /turtlebot_mmwave_launchers/launch/mapping_visualization.rviz
I got the window like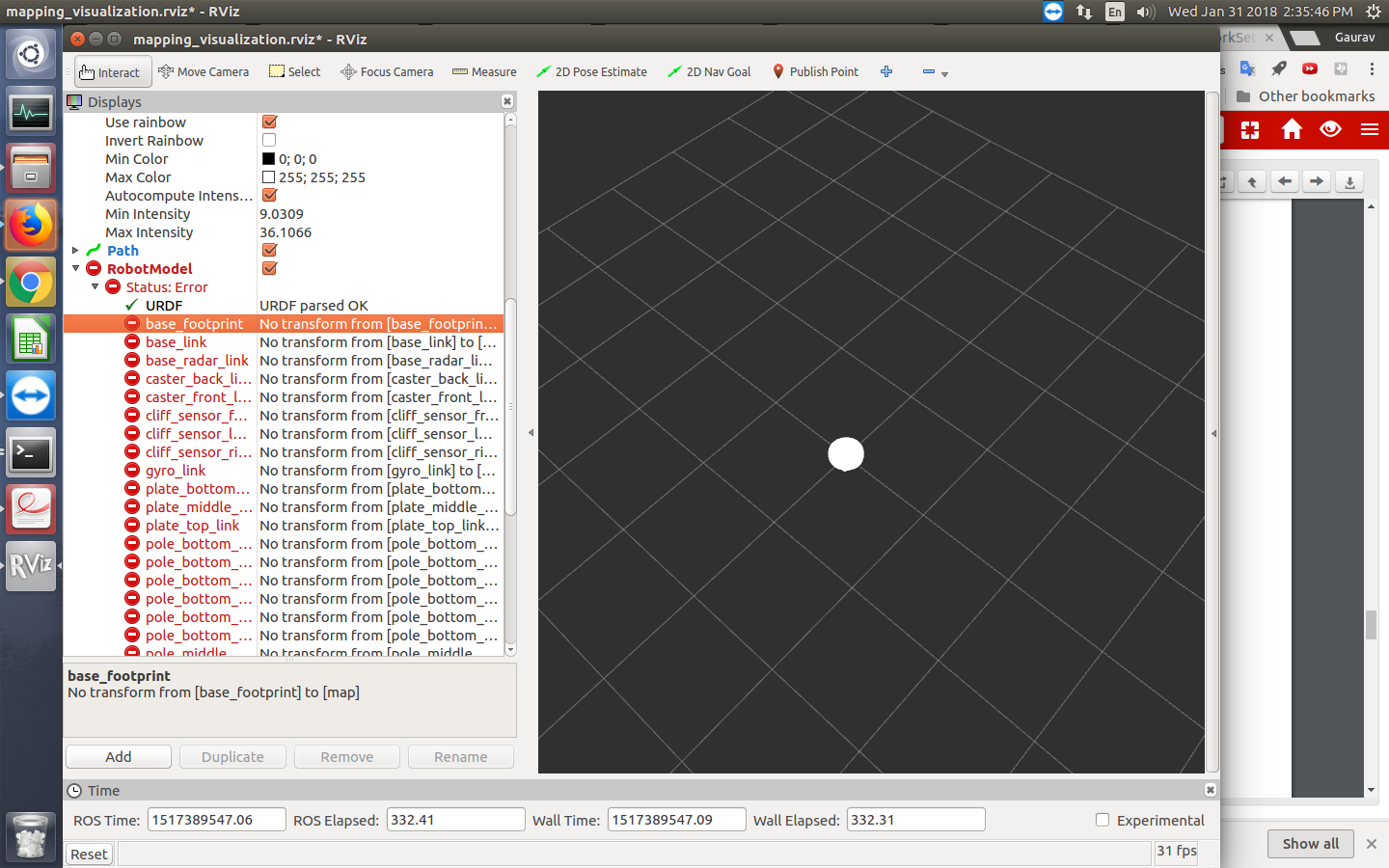
Also not able to see any point for detected object.
Also getting a warning-
[ WARN] [1517389369.832690379]: MessageFilter [target=/map ]: Dropped 100.00% of messages so far. Please turn the [ros.octomap_server.message_notifier] rosconsole logger to DEBUG for more information.
Any help?
Thanks.

