Other Parts Discussed in Thread: AWR1642, MMWAVE-SDK, AWR1443
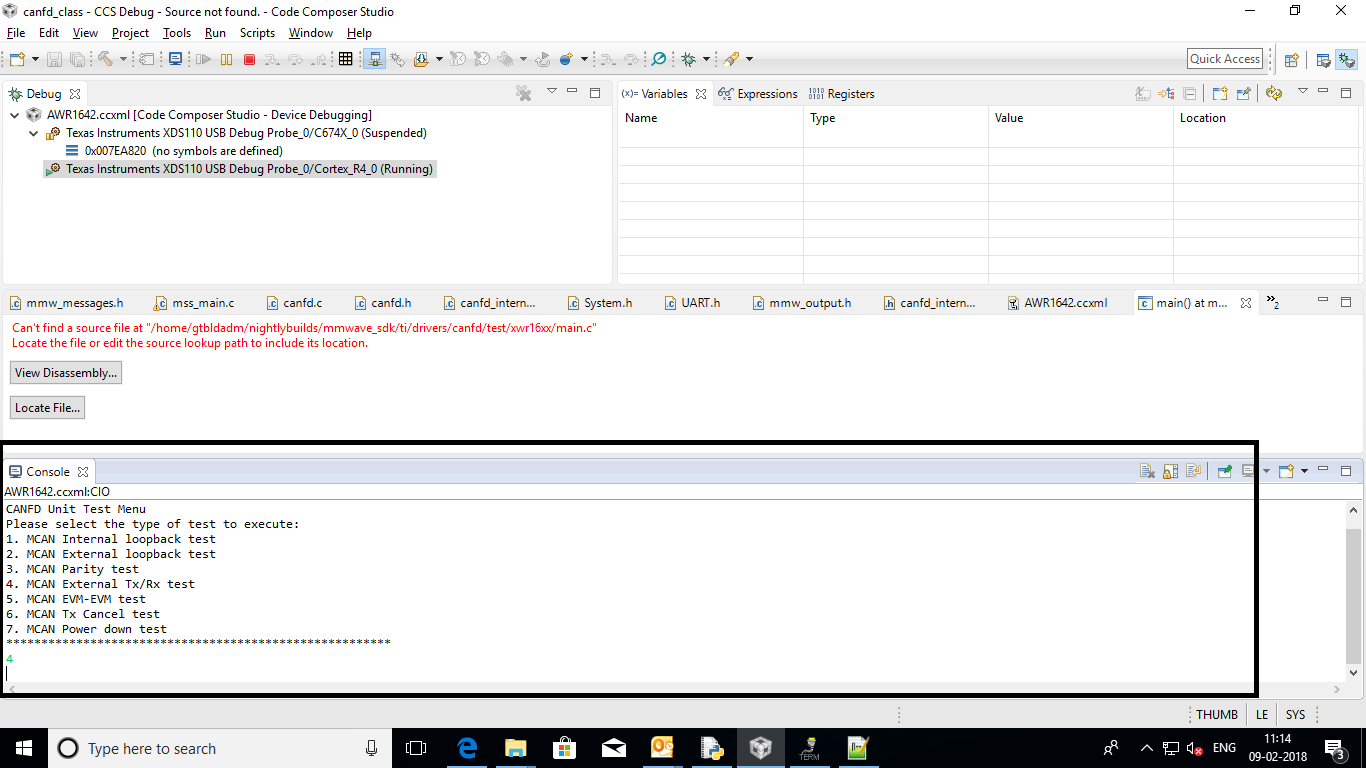
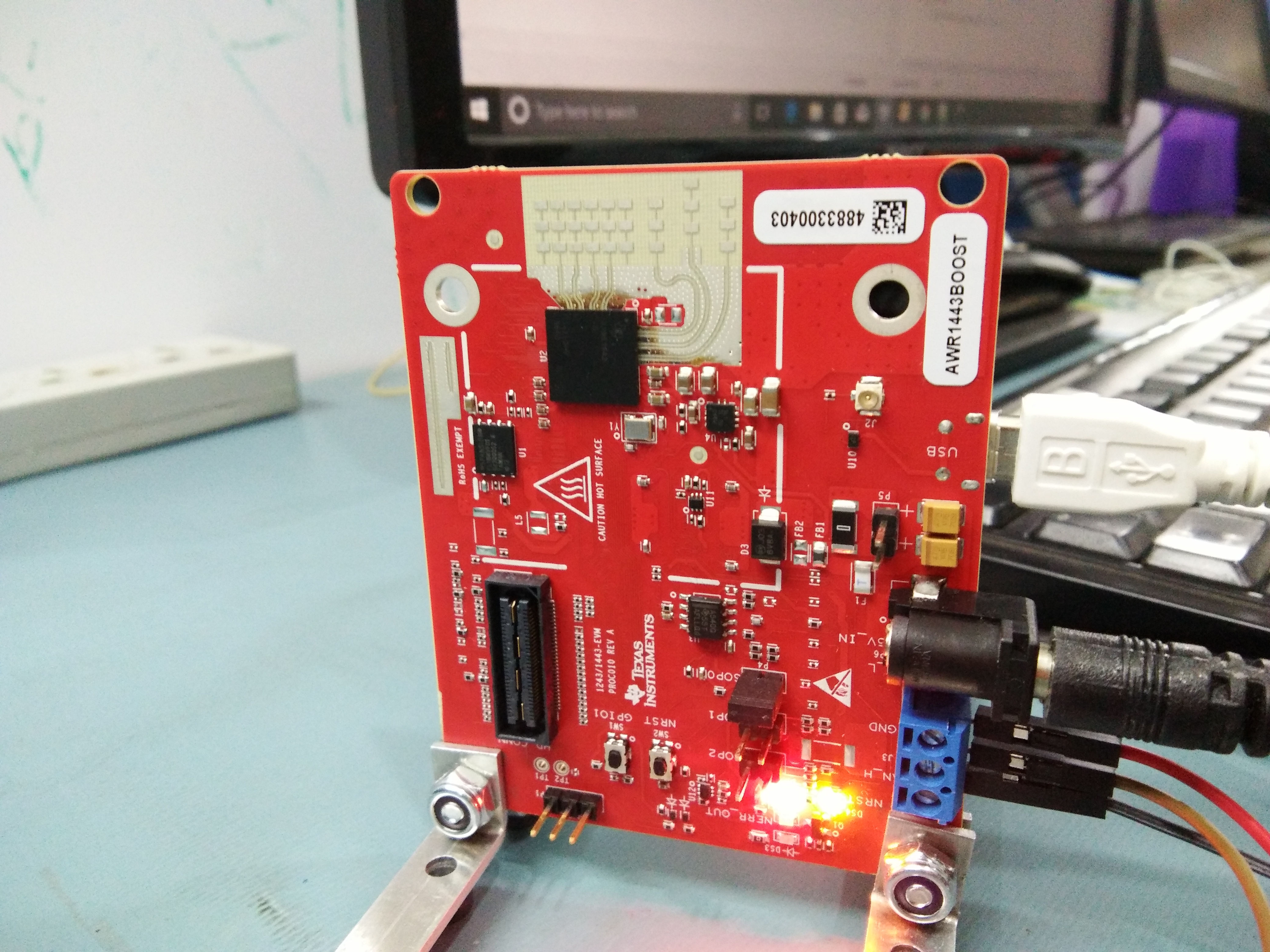
->I am using AWR1642BOOST CANFD to transmit classic frame.I have done necessary ECO changes mentioned in other forums(Removing R6 AND R4,keeping 0 ohm in R11 and R12)and frametype changed to classic.I have taken CANFD code from"C:\ti\mmwave_sdk_01_01_00_02\packages\ti\drivers\CANFD" and integrated to MMW DEMO code (removed internal external looping code) since my intention is to check CAN communication with demo code.I have ensured mcanTransmitTest() is called in this integrated code(verified by writing test byte to uart just before mcanTransmitTest() call).
->on receiver side we connected MCB2300 board from KEIL(since we don't have vector canoe or other tools at the moment).we have following CAN module settings
#define PCLK 24000000 /* Peripheral clock, depends on VPBDIV */
/* Values of bit time register for different baudrates
NT = Nominal bit time = TSEG1 + TSEG2 + 3
SP = Sample point = ((1+TSEG1+1)/(1+TSEG1+1+TSEG2+1)) * 100%
SAM, SJW, TSEG1, TSEG2, NT, SP */
const uint32_t CAN_BIT_TIME[] = { 0x0001C000, /* 0+1, 3+1, 1+1, 0+1, 4, 75% */
0x0012C000, /* 0+1, 3+1, 2+1, 1+1, 6, 67% */
0x0023C000, /* 0+1, 3+1, 3+1, 2+1, 8, 63% */
0x0025C000, /* 0+1, 3+1, 5+1, 2+1, 10, 70% */
0x0036C000, /* 0+1, 3+1, 6+1, 3+1, 12, 67% */
0x0048C000, /* 0+1, 3+1, 8+1, 4+1, 15, 67% */
0x0049C000, /* 0+1, 3+1, 9+1, 4+1, 16, 69% */
};
I can choose any one of above configuration and also I don't see two different configuration parameters like nominal and datatime segments in receiver side board
configuration.
a) so is it necessary has to be MCAN supported board in receiver side (I don't know MCB2300 board is of which type CAN).
b) If not,what are all the CAN configurations in receiver side has to exactly match with sender side(AWR1642 BOOST - CANFD CLASSIC FRAME)?
ex: peripheral clock,baudrate ..etc
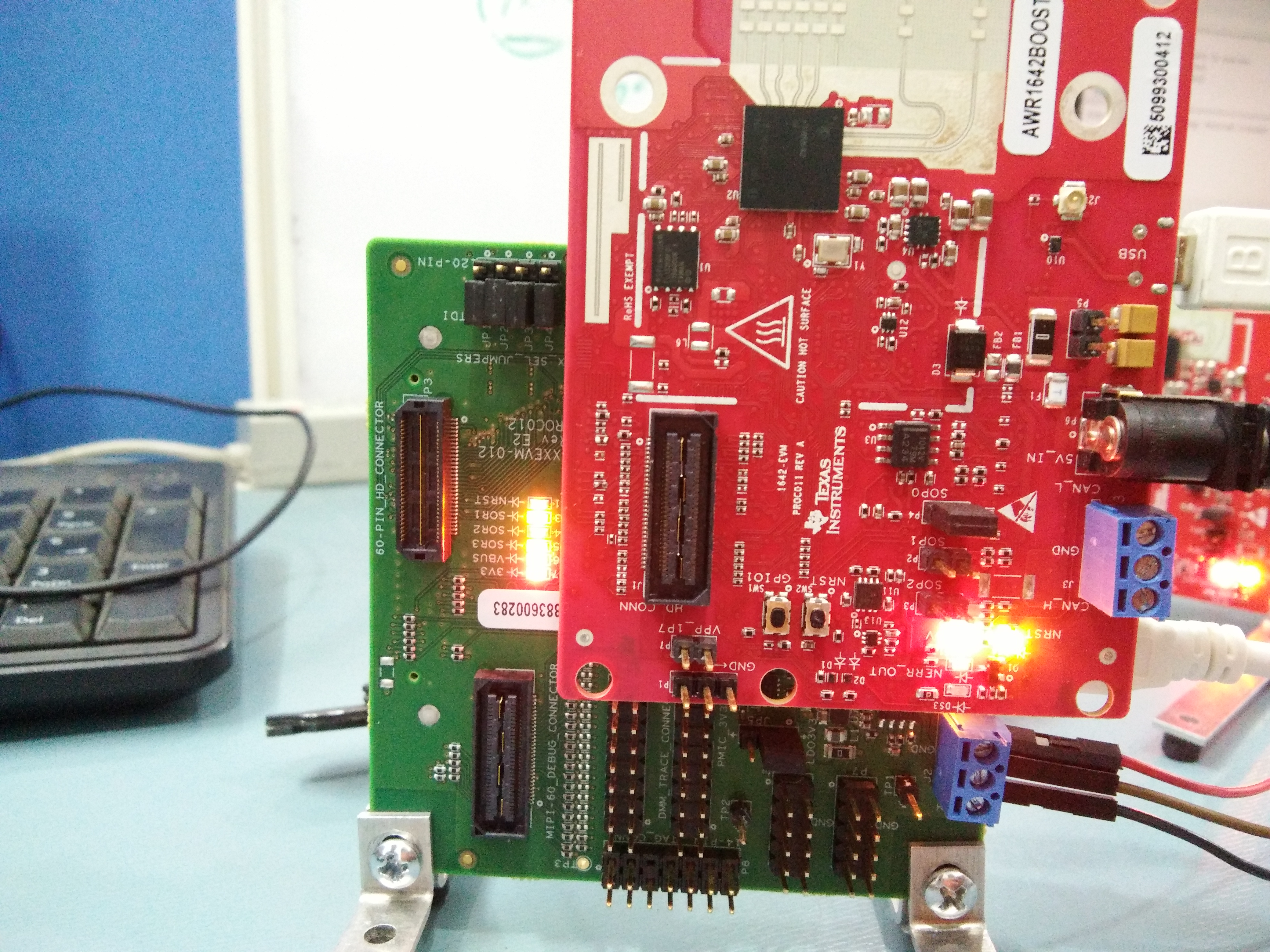
c) I tested by connecting CANH,CANL,GND to MCB2300 board CANH,CANL,GND pins and tried with
0x0025C000, /* 0+1, 3+1, 5+1(nominaltseg1=5), 2+1(nominaltseg2=2), 10(Networktime), 70%(sample point) */
but I am not receiving any CANRX interrupt on receiver side.
Thanks,
PTKRISHNA.